|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
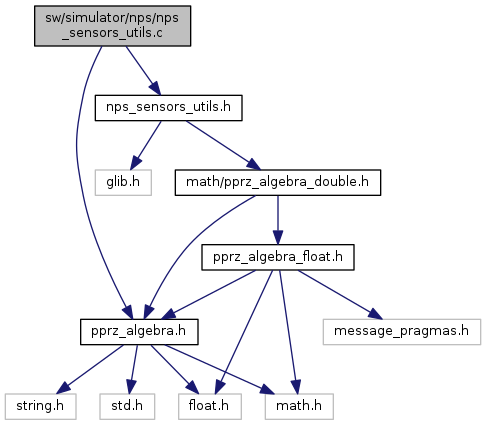
 Include dependency graph for nps_sensors_utils.c:
Include dependency graph for nps_sensors_utils.c:Go to the source code of this file.
Functions | |
| void | UpdateSensorLatency (double time, gpointer cur_reading, GSList **history, double latency, gpointer sensor_reading) |
| void | UpdateSensorLatency_Single (double time, gpointer cur_reading, GSList **history, double latency, gpointer sensor_reading) |
| void UpdateSensorLatency | ( | double | time, |
| gpointer | cur_reading, | ||
| GSList ** | history, | ||
| double | latency, | ||
| gpointer | sensor_reading | ||
| ) |
Definition at line 6 of file nps_sensors_utils.c.
References last, BoozDatedSensor::time, BoozDatedSensor::value, and VECT3_COPY.
Referenced by nps_sensor_gps_run_step().
Here is the caller graph for this function:| void UpdateSensorLatency_Single | ( | double | time, |
| gpointer | cur_reading, | ||
| GSList ** | history, | ||
| double | latency, | ||
| gpointer | sensor_reading | ||
| ) |
Definition at line 27 of file nps_sensors_utils.c.
References last, BoozDatedSensor_Single::time, and BoozDatedSensor_Single::value.
Referenced by nps_sensor_gps_run_step().
Here is the caller graph for this function: 1.8.8
1.8.8