|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Simulated Angle of Attack of the Wind for NPS simulator. More...
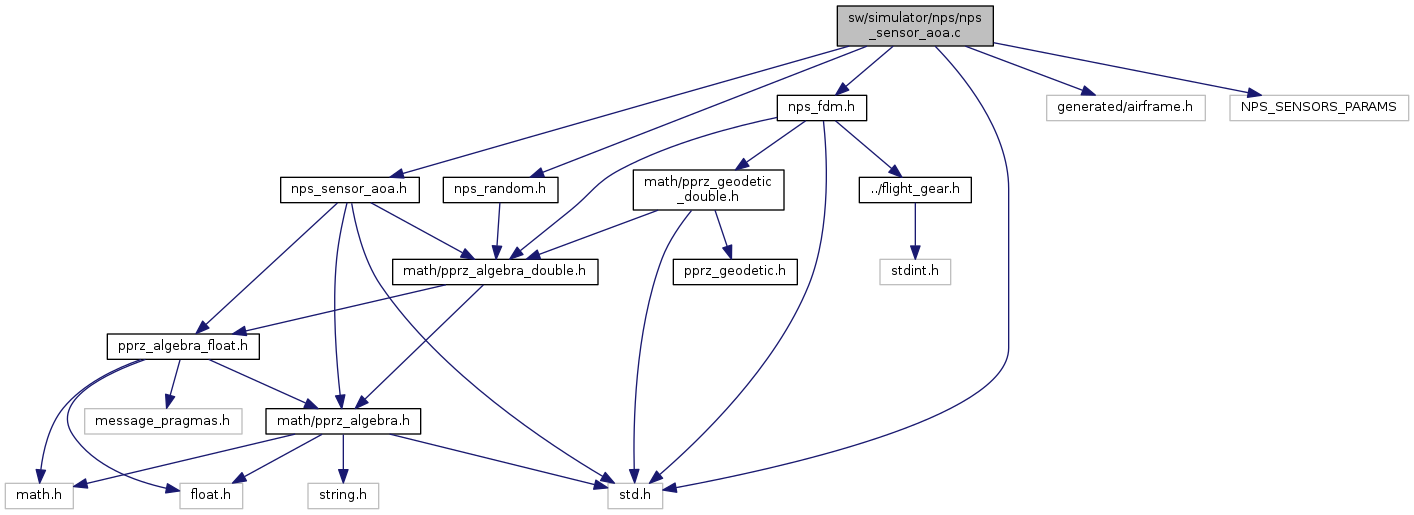
#include "nps_sensor_aoa.h"#include "generated/airframe.h"#include "std.h"#include "nps_fdm.h"#include "nps_random.h"#include <NPS_SENSORS_PARAMS> Include dependency graph for nps_sensor_aoa.c:
Include dependency graph for nps_sensor_aoa.c:Go to the source code of this file.
Macros | |
| #define | NPS_AOA_DT 0.01 |
| 10Hz default More... | |
| #define | NPS_AOA_NOISE_STD_DEV 0.001 |
| standard deviation in radian (default 0.001 rad) More... | |
| #define | NPS_AOA_OFFSET 0 |
Functions | |
| void | nps_sensor_aoa_init (struct NpsSensorAngleOfAttack *aoa, double time) |
| void | nps_sensor_aoa_run_step (struct NpsSensorAngleOfAttack *aoa, double time) |
Simulated Angle of Attack of the Wind for NPS simulator.
Definition in file nps_sensor_aoa.c.
| #define NPS_AOA_DT 0.01 |
10Hz default
Definition at line 39 of file nps_sensor_aoa.c.
Referenced by nps_sensor_aoa_run_step().
| #define NPS_AOA_NOISE_STD_DEV 0.001 |
standard deviation in radian (default 0.001 rad)
Definition at line 44 of file nps_sensor_aoa.c.
Referenced by nps_sensor_aoa_init().
| #define NPS_AOA_OFFSET 0 |
Definition at line 48 of file nps_sensor_aoa.c.
Referenced by nps_sensor_aoa_init().
| void nps_sensor_aoa_init | ( | struct NpsSensorAngleOfAttack * | aoa, |
| double | time | ||
| ) |
Definition at line 52 of file nps_sensor_aoa.c.
References NpsSensorAngleOfAttack::data_available, FALSE, NpsSensorAngleOfAttack::next_update, NpsSensorAngleOfAttack::noise_std_dev, NPS_AOA_NOISE_STD_DEV, NPS_AOA_OFFSET, NpsSensorAngleOfAttack::offset, and NpsSensorAngleOfAttack::value.
Referenced by nps_sensors_init().
Here is the caller graph for this function:| void nps_sensor_aoa_run_step | ( | struct NpsSensorAngleOfAttack * | aoa, |
| double | time | ||
| ) |
Definition at line 62 of file nps_sensor_aoa.c.
References NpsFdm::aoa, NpsSensorAngleOfAttack::data_available, fdm, get_gaussian_noise(), NpsSensorAngleOfAttack::next_update, NpsSensorAngleOfAttack::noise_std_dev, NPS_AOA_DT, NpsSensorAngleOfAttack::offset, TRUE, and NpsSensorAngleOfAttack::value.
Referenced by nps_sensors_run_step().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8