|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | mf_ptu_init (void) |
| Data acquisition module for Meteo France PTU board. More... | |
| void | mf_ptu_periodic (void) |
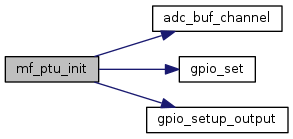
| void mf_ptu_init | ( | void | ) |
Data acquisition module for Meteo France PTU board.
Definition at line 76 of file mf_ptu.c.
References adc_buf_channel(), ADC_CHANNEL_PTU_NB_SAMPLES, gpio_set(), gpio_setup_output(), humid_period, pressure_adc, pressure_buf, temp_adc, and temp_buf.
Here is the call graph for this function:| void mf_ptu_periodic | ( | void | ) |
Definition at line 95 of file mf_ptu.c.
References adc_buf::av_nb_sample, GpsState::course, DefaultChannel, DefaultDevice, GpsState::fix, get_pwm_input_period_in_usec(), gps, GpsState::gspeed, GpsState::hmsl, humid_period, LlaCoor_i::lat, GpsState::lla_pos, LlaCoor_i::lon, GpsState::ned_vel, pprzLogFile, pressure_adc, pressure_buf, PTU_HUMIDTY_OFFSET, PTU_HUMIDTY_SCALE, PTU_PRESSURE_OFFSET, PTU_PRESSURE_SCALE, PTU_TEMPERATURE_OFFSET, PTU_TEMPERATURE_SCALE, adc_buf::sum, temp_adc, temp_buf, GpsState::tow, GpsState::week, and NedCoor_i::z.
Here is the call graph for this function: 1.8.8
1.8.8