|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | dw1000_arduino_init (void) |
| void | dw1000_arduino_periodic (void) |
| void | dw1000_arduino_report (void) |
| void | dw1000_arduino_event (void) |
| void | dw1000_reset_heading_ref (void) |
| Reset reference heading to current heading AHRS/INS should be aligned before calling this function. More... | |
Definition in file dw1000_arduino.h.
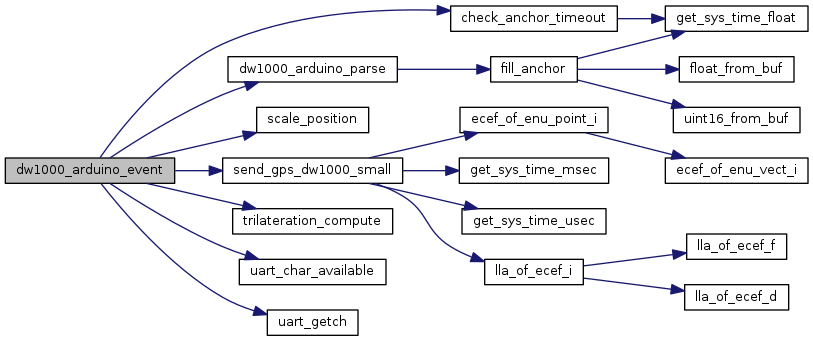
| void dw1000_arduino_event | ( | void | ) |
Definition at line 292 of file dw1000_arduino.c.
References DW1000::anchors, check_anchor_timeout(), dw1000, dw1000_arduino_parse(), DW1000::raw_pos, scale_position(), send_gps_dw1000_small(), trilateration_compute(), uart_char_available(), uart_getch(), and DW1000::updated.
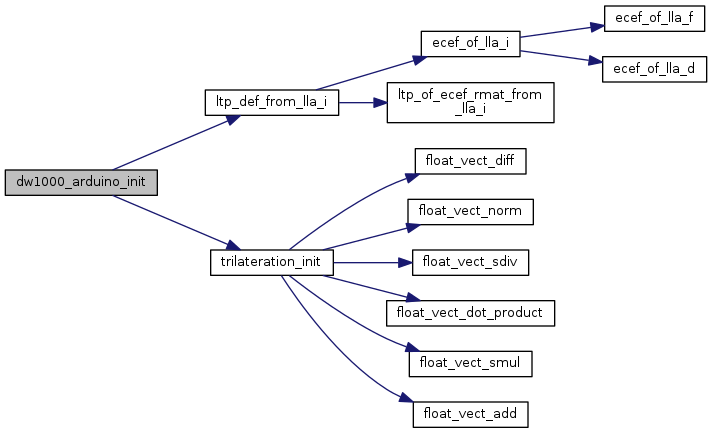
Here is the call graph for this function:| void dw1000_arduino_init | ( | void | ) |
Definition at line 216 of file dw1000_arduino.c.
References LlaCoor_i::alt, DW1000::anchors, GpsState::cacc, DW1000::ck, GpsState::comp_id, Anchor::distance, dw1000, DW1000_INITIAL_HEADING, DW1000_NB_ANCHORS, DW_WAIT_STX, GpsState::fix, DW1000::gps_dw1000, GPS_DW1000_ID, GPS_FIX_NONE, Anchor::id, ids, DW1000::idx, DW1000::initial_heading, LlaCoor_i::lat, LlaCoor_i::lon, DW1000::ltp_def, ltp_def_from_lla_i(), GpsState::pacc, GpsState::pdop, Anchor::pos, DW1000::pos, pos_x, pos_y, pos_z, GpsState::sacc, DW1000::state, Anchor::time, trilateration_init(), DW1000::updated, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Here is the call graph for this function:| void dw1000_arduino_periodic | ( | void | ) |
Definition at line 256 of file dw1000_arduino.c.
References dw1000, DW1000::gps_dw1000, and gps_periodic_check().
Here is the call graph for this function:| void dw1000_arduino_report | ( | void | ) |
Definition at line 262 of file dw1000_arduino.c.
References DW1000::anchors, DefaultChannel, DefaultDevice, Anchor::distance, dw1000, DW1000::pos, DW1000::raw_pos, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
| void dw1000_reset_heading_ref | ( | void | ) |
Reset reference heading to current heading AHRS/INS should be aligned before calling this function.
Definition at line 194 of file dw1000_arduino.c.
References dw1000, DW1000::initial_heading, FloatEulers::psi, and stateGetNedToBodyEulers_f().
Here is the call graph for this function: 1.8.8
1.8.8