|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Common code for AP and FBW telemetry. More...
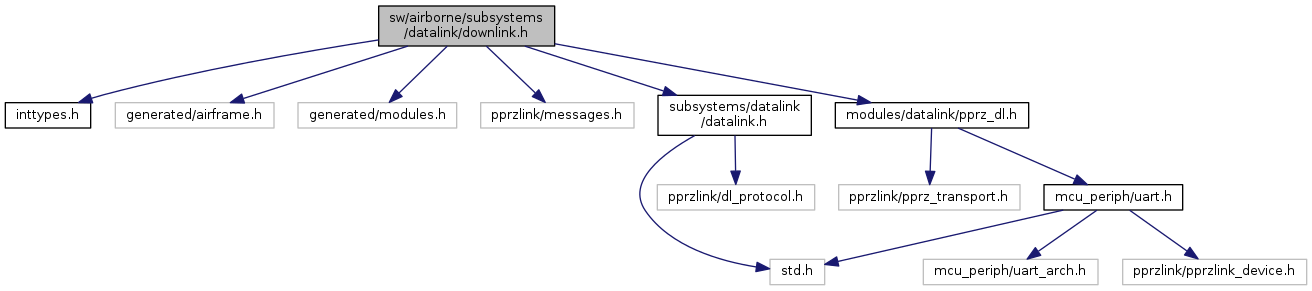
#include <inttypes.h>#include "generated/airframe.h"#include "generated/modules.h"#include "pprzlink/messages.h"#include "subsystems/datalink/datalink.h"#include "modules/datalink/pprz_dl.h" Include dependency graph for downlink.h:
Include dependency graph for downlink.h:Go to the source code of this file.
Macros | |
| #define | DefaultChannel DOWNLINK_TRANSPORT |
| #define | DefaultDevice DOWNLINK_DEVICE |
Functions | |
| void | downlink_init (void) |
Common code for AP and FBW telemetry.
Definition in file downlink.h.
| #define DefaultChannel DOWNLINK_TRANSPORT |
Definition at line 42 of file downlink.h.
Referenced by adc_generic_periodic(), add_slot(), ahrs_dcm_update_mag(), ahrs_float_invariant_propagate(), airspeed_amsys_downlink(), airspeed_ets_read_event(), airspeed_otf_parse(), airspeed_uADC_periodic(), alt_filter_periodic(), alt_kalman(), aoa_adc_update(), aoa_pwm_update(), ArduIMU_event(), atmega_i2c_cam_ctrl_event(), atmega_i2c_cam_ctrl_send(), autopilot_send_mode(), autopilot_send_version(), baro_amsys_read_periodic(), baro_bmp_event(), baro_ets_read_event(), baro_event(), baro_hca_read_event(), baro_mpl3115_read_event(), baro_MS5534A_event(), baro_ms5611_event(), baro_ms5611_send_coeff(), baro_periodic(), baro_scp_event(), calibration(), charge_sens_event(), config_mkk_v2_periodic_telemetry(), copilot_parse_move_wp_dl(), copilot_parse_payload_command_dl(), copilot_periodic(), dc_info(), dc_send_shot_position(), dl_parse_msg(), DownlinkSendWpNr(), dpicco_event(), dust_gp2y_event(), dw1000_arduino_report(), flight_benchmark_periodic(), formation_flight(), geiger_counter_event(), georeference_filter(), georeference_project(), glide_wing_lock_periodic(), gps_ubx_ucenter_configure(), gsm_event(), hmc5843_module_periodic(), humid_hih_periodic(), humid_htm_event(), humid_sht_event_i2c(), humid_sht_periodic(), humid_sht_periodic_i2c(), humid_sht_uart_parse(), imu_apogee_downlink_raw(), IMU_Daten_verarbeiten(), imu_hbmini_downlink_raw(), imu_krooz_downlink_raw(), imu_mpu9250_report(), imu_navgo_downlink_raw(), imu_temp_ctrl_periodic(), imu_umarim_downlink_raw(), ins_float_invariant_propagate(), ir_mlx_event(), ir_mlx_periodic(), lidar_lite_downlink(), lidar_sf11_downlink(), light_solar_periodic(), light_temt_periodic(), lm75_event(), mag_calib_send_state(), mag_hmc58xx_report(), main_periodic(), main_periodic_task(), max11040_periodic(), mf_daq_send_report(), mf_ptu_periodic(), micromag_event(), mission_status_report(), monitor_task(), MPPT_ask(), MPPT_periodic(), ms45xx_i2c_event(), navigation_task(), navigation_update_wp_from_speed(), nps_autopilot_run_step(), object_tracking_run(), on_DL_SETTING(), parse_ins_msg(), parse_xsens_msg(), pcap01_event(), periodic_2Hz_openlog(), periodic_downlink_carto(), periodic_report_sysmon(), periodic_telemetry_err_report(), periodic_telemetry_handle(), potential_task(), px4flow_downlink(), px4flow_i2c_downlink(), qr_code_spi_link_periodic(), qrscan(), reporting_task(), run_avoid_navigation_onvision(), Send(), send_imu_mag_current(), send_theta_to_nei(), serial_update(), sonar_adc_read(), sonar_bebop_read(), srf08_event(), start_formation(), stereocam_droplet_periodic(), stereocam_parse_msg(), stop_formation(), tcas_periodic_task_1Hz(), telemetry_periodic(), temod_event(), temp_adc_periodic(), temp_tcouple_adc_periodic(), teraranger_downlink(), tmp102_event(), trigger_ext_periodic(), vff_propagate(), vms_ecu_demo_downlink(), vn100_report_task(), waypoint_move_enu_i(), waypoint_move_lla(), wind_estimator_event(), wind_estimator_periodic(), wind_gfi_event(), windturbine_periodic(), and xtend_rssi_periodic().
| #define DefaultDevice DOWNLINK_DEVICE |
Definition at line 46 of file downlink.h.
Referenced by adc_generic_periodic(), add_slot(), ahrs_dcm_update_mag(), ahrs_float_invariant_propagate(), airspeed_amsys_downlink(), airspeed_ets_read_event(), airspeed_otf_parse(), airspeed_uADC_periodic(), alt_filter_periodic(), alt_kalman(), aoa_adc_update(), aoa_pwm_update(), ArduIMU_event(), atmega_i2c_cam_ctrl_event(), atmega_i2c_cam_ctrl_send(), autopilot_send_mode(), autopilot_send_version(), baro_amsys_read_periodic(), baro_bmp_event(), baro_ets_read_event(), baro_event(), baro_hca_read_event(), baro_mpl3115_read_event(), baro_MS5534A_event(), baro_ms5611_event(), baro_ms5611_send_coeff(), baro_periodic(), baro_scp_event(), calibration(), charge_sens_event(), config_mkk_v2_periodic_telemetry(), copilot_parse_move_wp_dl(), copilot_parse_payload_command_dl(), copilot_periodic(), dc_info(), dc_send_shot_position(), dl_parse_msg(), downlink_init(), DownlinkSendWpNr(), dpicco_event(), dust_gp2y_event(), dw1000_arduino_report(), flight_benchmark_periodic(), formation_flight(), geiger_counter_event(), georeference_filter(), georeference_project(), glide_wing_lock_periodic(), gps_ubx_ucenter_configure(), gsm_event(), hmc5843_module_periodic(), humid_hih_periodic(), humid_htm_event(), humid_sht_event_i2c(), humid_sht_periodic(), humid_sht_periodic_i2c(), humid_sht_uart_parse(), imu_apogee_downlink_raw(), IMU_Daten_verarbeiten(), imu_hbmini_downlink_raw(), imu_krooz_downlink_raw(), imu_mpu9250_report(), imu_navgo_downlink_raw(), imu_temp_ctrl_periodic(), imu_umarim_downlink_raw(), ins_float_invariant_propagate(), ir_mlx_event(), ir_mlx_periodic(), lidar_lite_downlink(), lidar_sf11_downlink(), light_solar_periodic(), light_temt_periodic(), lm75_event(), mag_calib_send_state(), mag_hmc58xx_report(), main_periodic(), main_periodic_task(), max11040_periodic(), mf_daq_send_report(), mf_ptu_periodic(), micromag_event(), mission_status_report(), monitor_task(), MPPT_ask(), MPPT_periodic(), ms45xx_i2c_event(), navigation_task(), navigation_update_wp_from_speed(), nps_autopilot_run_step(), object_tracking_run(), on_DL_SETTING(), parse_ins_msg(), parse_xsens_msg(), pcap01_event(), periodic_2Hz_openlog(), periodic_downlink_carto(), periodic_report_sysmon(), periodic_telemetry_err_report(), periodic_telemetry_handle(), potential_task(), px4flow_downlink(), px4flow_i2c_downlink(), qr_code_spi_link_periodic(), qrscan(), reporting_task(), run_avoid_navigation_onvision(), Send(), send_imu_mag_current(), send_theta_to_nei(), serial_update(), sonar_adc_read(), sonar_bebop_read(), srf08_event(), start_formation(), stereocam_droplet_periodic(), stereocam_parse_msg(), stop_formation(), tcas_periodic_task_1Hz(), telemetry_periodic(), temod_event(), temp_adc_periodic(), temp_tcouple_adc_periodic(), teraranger_downlink(), tmp102_event(), trigger_ext_periodic(), vff_propagate(), vms_ecu_demo_downlink(), vn100_report_task(), waypoint_move_enu_i(), waypoint_move_lla(), wind_estimator_event(), wind_estimator_periodic(), wind_gfi_event(), windturbine_periodic(), and xtend_rssi_periodic().
| void downlink_init | ( | void | ) |
Definition at line 67 of file downlink.c.
References datalink_nb_msgs, DefaultDevice, DefaultPeriodic, register_periodic_telemetry(), and send_downlink().
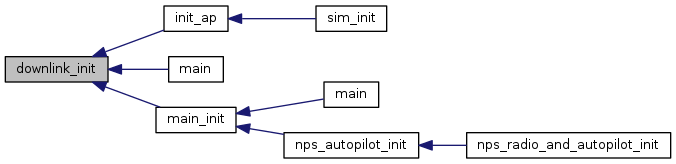
Referenced by init_ap(), main(), and main_init().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8