|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
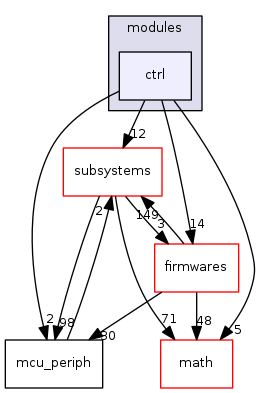
 Directory dependency graph for ctrl:
Directory dependency graph for ctrl:Files | |
| file | ctrl_effectiveness_scheduling.c [code] |
| Module that interpolates gainsets in flight based on the transition percentage. | |
| file | ctrl_effectiveness_scheduling.h [code] |
| file | ctrl_module_innerloop_demo.c [code] |
| example empty controller | |
| file | ctrl_module_innerloop_demo.h [code] |
| example empty controller | |
| file | ctrl_module_outerloop_demo.c [code] |
| example empty controller | |
| file | ctrl_module_outerloop_demo.h [code] |
| example empty controller | |
| file | gain_scheduling.c [code] |
| Module that interpolates gainsets in flight based on a scheduling variable. | |
| file | gain_scheduling.h [code] |
| Module that interpolates between gain sets, depending on the scheduling variable. | |
| file | object_tracking.c [code] |
| file | object_tracking.h [code] |
| file | optical_flow_functions.c [code] |
| file | optical_flow_functions.h [code] |
| file | optical_flow_hover.c [code] |
| file | optical_flow_hover.h [code] |
| file | optical_flow_landing.c [code] |
| This module implements optical flow landings in which the divergence is kept constant. | |
| file | optical_flow_landing.h [code] |
| This module implements optical flow landings in which the divergence is kept constant. | |
| file | vertical_ctrl_module_demo.c [code] |
| example vertical controller | |
| file | vertical_ctrl_module_demo.h [code] |
| example vertical | |
 1.8.8
1.8.8