|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
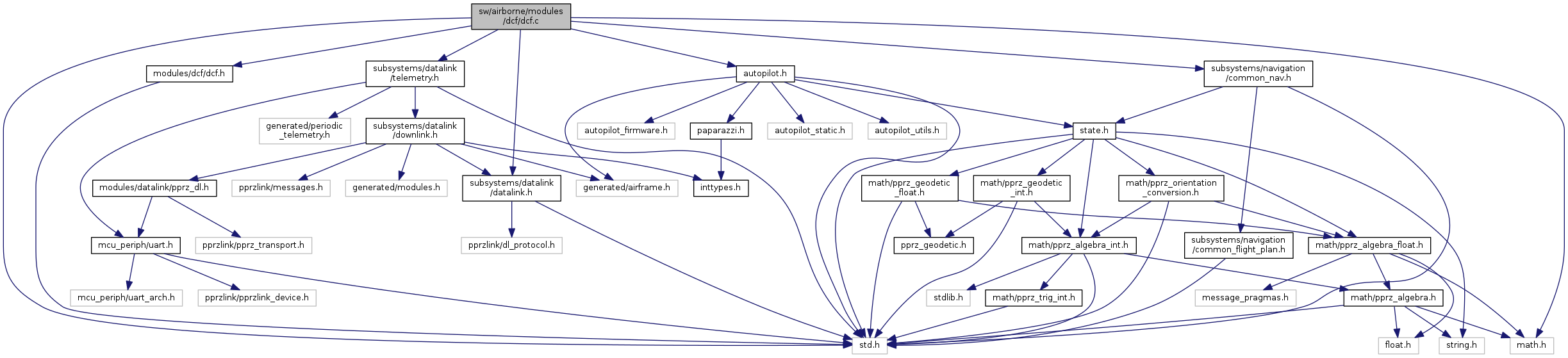
#include <math.h>#include <std.h>#include "modules/dcf/dcf.h"#include "subsystems/datalink/datalink.h"#include "subsystems/datalink/telemetry.h"#include "subsystems/navigation/common_nav.h"#include "autopilot.h" Include dependency graph for dcf.c:
Include dependency graph for dcf.c:Go to the source code of this file.
Macros | |
| #define | DCF_GAIN_K 10 |
| #define | DCF_RADIUS 80 |
| #define | DCF_TIMEOUT 1500 |
| #define | DCF_BROADTIME 200 |
Functions | |
| static void | send_dcf (struct transport_tx *trans, struct link_device *dev) |
| void | dcf_init (void) |
| bool | distributed_circular (uint8_t wp) |
| void | send_theta_to_nei (void) |
| void | parseRegTable (void) |
| void | parseThetaTable (void) |
Variables | |
| struct dcf_con | dcf_control = {DCF_GAIN_K, DCF_RADIUS, DCF_TIMEOUT, 0, DCF_BROADTIME} |
| struct dcf_tab | dcf_tables |
| uint32_t | last_transmision = 0 |
| #define DCF_TIMEOUT 1500 |
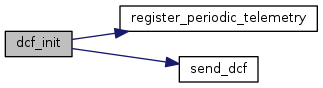
| void dcf_init | ( | void | ) |
Definition at line 63 of file dcf.c.
References DCF_MAX_NEIGHBORS, dcf_tables, DefaultPeriodic, dcf_tab::error_sigma, register_periodic_telemetry(), send_dcf(), and dcf_tab::tableNei.
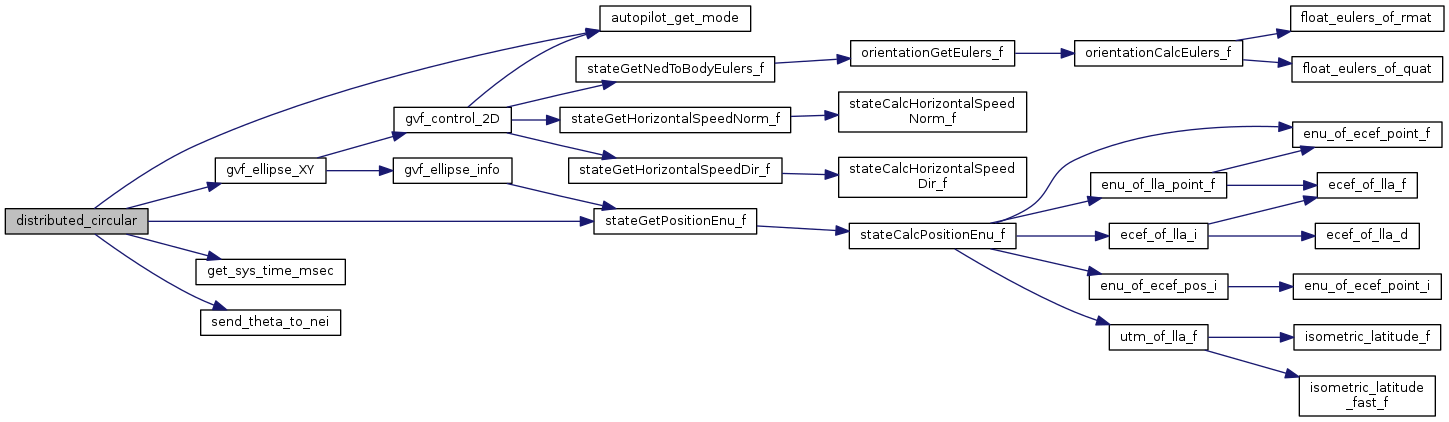
Here is the call graph for this function:| bool distributed_circular | ( | uint8_t | wp | ) |
Definition at line 75 of file dcf.c.
References AP_MODE_AUTO2, autopilot_get_mode(), dcf_con::broadtime, c1, c2, DCF_MAX_NEIGHBORS, dcf_tables, dcf_tab::error_sigma, get_sys_time_msec(), gvf_control, gvf_ellipse_XY(), dcf_con::k, dcf_tab::last_theta, last_transmision, p, dcf_con::radius, gvf_con::s, send_theta_to_nei(), stateGetPositionEnu_f(), dcf_tab::tableNei, dcf_con::theta, dcf_con::timeout, timeout, waypoints, point::x, EnuCoor_f::x, point::y, and EnuCoor_f::y.
Here is the call graph for this function:| void parseRegTable | ( | void | ) |
Definition at line 140 of file dcf.c.
References ac_id, DCF_MAX_NEIGHBORS, dcf_tables, dl_buffer, and dcf_tab::tableNei.
| void parseThetaTable | ( | void | ) |
Definition at line 169 of file dcf.c.
References DCF_MAX_NEIGHBORS, dcf_tables, dl_buffer, get_sys_time_msec(), dcf_tab::last_theta, and dcf_tab::tableNei.
Here is the call graph for this function:
|
static |
Definition at line 33 of file dcf.c.
References DCF_MAX_NEIGHBORS, dcf_tables, dcf_tab::error_sigma, and dcf_tab::tableNei.
Referenced by dcf_init().
Here is the caller graph for this function:| void send_theta_to_nei | ( | void | ) |
Definition at line 125 of file dcf.c.
References DCF_MAX_NEIGHBORS, dcf_tables, DefaultChannel, DefaultDevice, dcf_tab::tableNei, and dcf_con::theta.
Referenced by distributed_circular().
Here is the caller graph for this function:| struct dcf_con dcf_control = {DCF_GAIN_K, DCF_RADIUS, DCF_TIMEOUT, 0, DCF_BROADTIME} |
| struct dcf_tab dcf_tables |
Definition at line 59 of file dcf.c.
Referenced by dcf_init(), distributed_circular(), parseRegTable(), parseThetaTable(), send_dcf(), and send_theta_to_nei().
| uint32_t last_transmision = 0 |
Definition at line 61 of file dcf.c.
Referenced by distributed_circular().
 1.8.8
1.8.8