|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.14.0_stable-0-g3f680d1
Paparazzi is a free software Unmanned Aircraft System.
|
Functions for solving a perspective-n-point problem, using the AHRS to get the relevant angles. More...
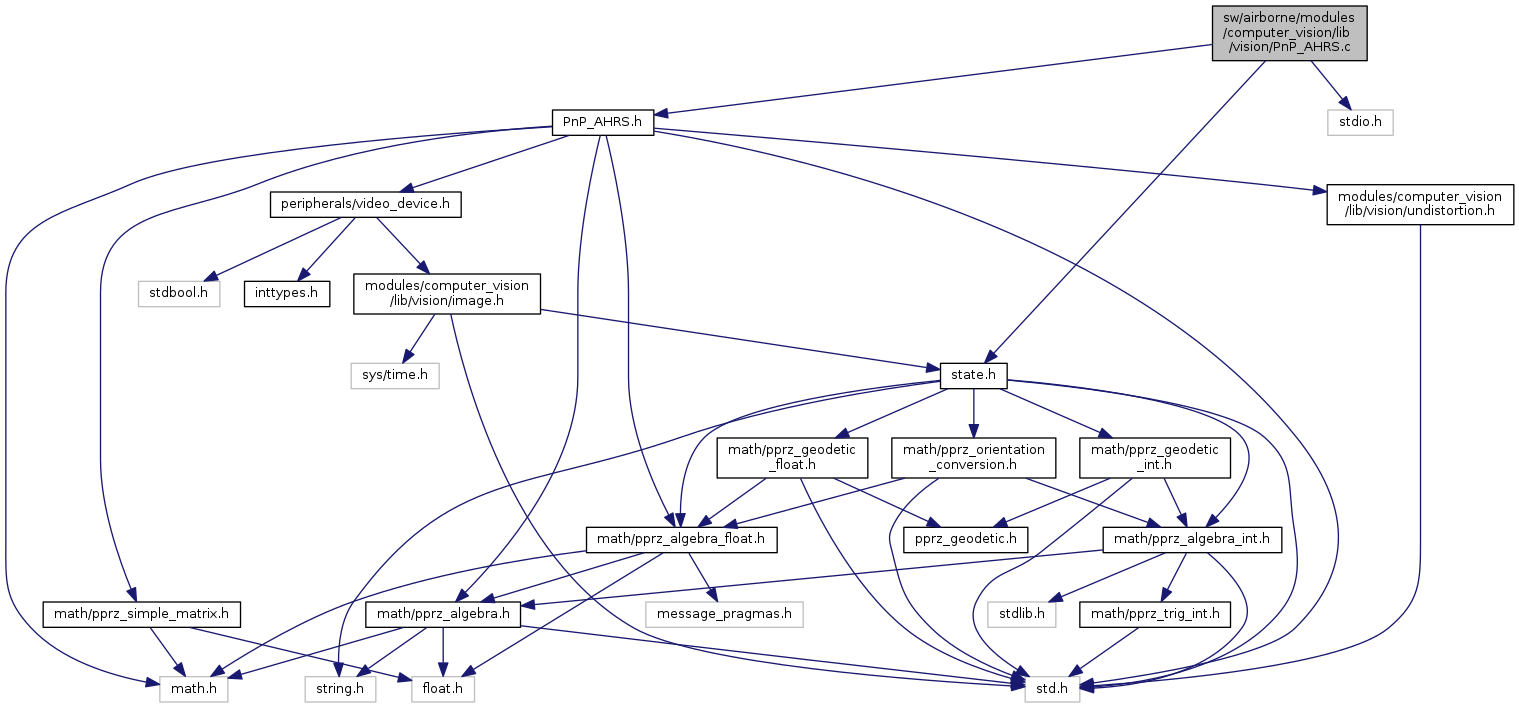
 Include dependency graph for PnP_AHRS.c:
Include dependency graph for PnP_AHRS.c:Go to the source code of this file.
Functions | |
| struct FloatVect3 | get_world_position_from_image_points (int *x_corners, int *y_corners, struct FloatVect3 *world_corners, int n_corners, struct camera_intrinsics_t cam_intrinsics, struct FloatEulers cam_body) |
| Get the world position of the camera, given image coordinates and corresponding world coordinates. More... | |
Functions for solving a perspective-n-point problem, using the AHRS to get the relevant angles.
Solves a perspective-n-point problem while using the attitude estimates of the AHRS. Using the AHRS makes the solution more robust than a purely maximal likelihood estimate from a standard PnP solver.
The module needs to get information on:
Definition in file PnP_AHRS.c.
| struct FloatVect3 get_world_position_from_image_points | ( | int * | x_corners, |
| int * | y_corners, | ||
| struct FloatVect3 * | world_corners, | ||
| int | n_corners, | ||
| struct camera_intrinsics_t | cam_intrinsics, | ||
| struct FloatEulers | cam_body | ||
| ) |
Get the world position of the camera, given image coordinates and corresponding world coordinates.
| [in] | x_corners | Image x-coordinates of the corners. |
| [in] | y_corners | Image y-coordinates of the corners. |
| [in] | world_corners | World coordinates of the corners. The order has to be the same as for the image coordinates. |
| [in] | n_corners | Number of corners. |
| [in] | cam_intrinsics | The camera intrinsics necessary for doing undistortion. |
| [in] | cam_body | The rotation from camera to body. |
| [out] | A | single struct FloatVect3 representing the camera world position. |
Definition at line 54 of file PnP_AHRS.c.
References cam_body, distorted_pixels_to_normalized_coords(), FLOAT_MAT33_DIAG, FLOAT_MAT33_ZERO, float_rmat_of_eulers_321(), FLOAT_VECT3_ZERO, K, MAT33_COPY, MAT33_INV, MAT33_MAT33_DIFF, MAT33_MAT33_SUM, MAT33_TRANS, MAT33_VECT3_MUL, n_corners, FloatEulers::phi, FloatEulers::psi, stateGetNedToBodyEulers_f(), FloatEulers::theta, VECT3_NORM2, VECT3_SDIV, VECT3_SUM, VECT3_VECT3_TRANS_MUL, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by detect_gate_func().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8