Go to the source code of this file.
Definition at line 38 of file video_device.h.
| Data Fields |
|---|
|
struct v4l2_device * |
dev |
The V4L2 device that is used for the video stream. |
|
volatile bool |
is_running |
When the device is running. |
| struct camera_intrinsics_t |
Definition at line 46 of file video_device.h.
| Data Fields |
|---|
|
float |
center_x |
center image coordinate in the x-direction |
|
float |
center_y |
center image coordinate in the y-direction |
|
float |
Dhane_k |
(un)distortion parameter for a fish-eye lens |
|
float |
focal_x |
focal length in the x-direction in pixels |
|
float |
focal_y |
focal length in the y-direction in pixels |
V4L2 device settings.
Definition at line 55 of file video_device.h.
| Data Fields |
|---|
|
uint8_t |
buf_cnt |
Amount of V4L2 video device buffers. |
|
struct camera_intrinsics_t |
camera_intrinsics |
Intrinsics of the camera; camera calibration parameters and distortion parameter(s) |
|
struct crop_t |
crop |
Cropped area definition. |
|
struct video_listener * |
cv_listener |
The first computer vision listener in the linked list for this video device. |
|
char * |
dev_name |
path to device |
|
uint8_t |
filters |
filters to use (bitfield with VIDEO_FILTER_x) |
|
uint32_t |
format |
Video format. |
|
int |
fps |
Target FPS. |
|
struct img_size_t |
output_size |
Output image size. |
|
struct img_size_t |
sensor_size |
Original sensor size. |
|
uint32_t |
subdev_format |
Subdevice video format. |
|
char * |
subdev_name |
path to sub device |
|
struct video_thread_t |
thread |
Information about the thread this camera is running on. |
| #define VIDEO_FILTER_DEBAYER (0x1 << 0) |
| #define VIDEO_FILTER_ISP (0x1 << 1) |
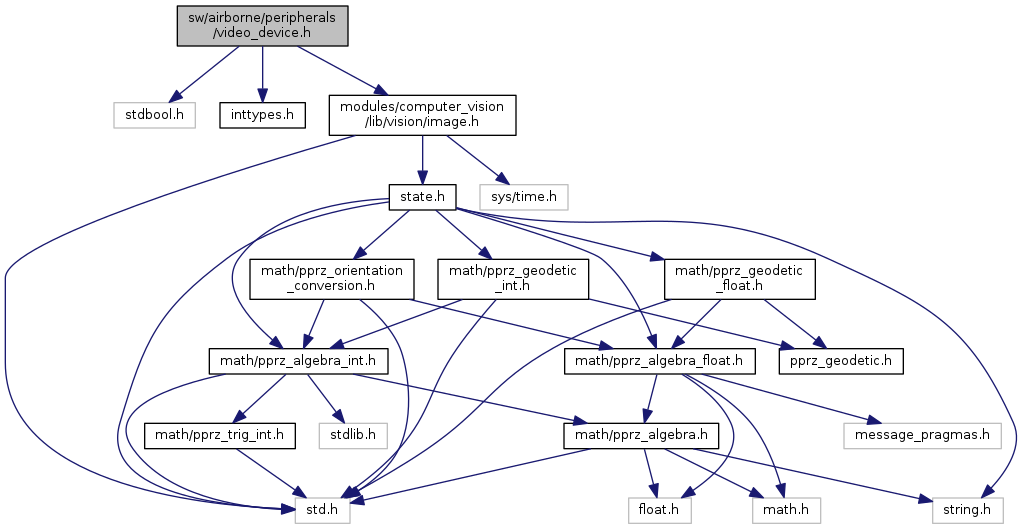
 Include dependency graph for video_device.h:
Include dependency graph for video_device.h: 1.8.8
1.8.8