|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
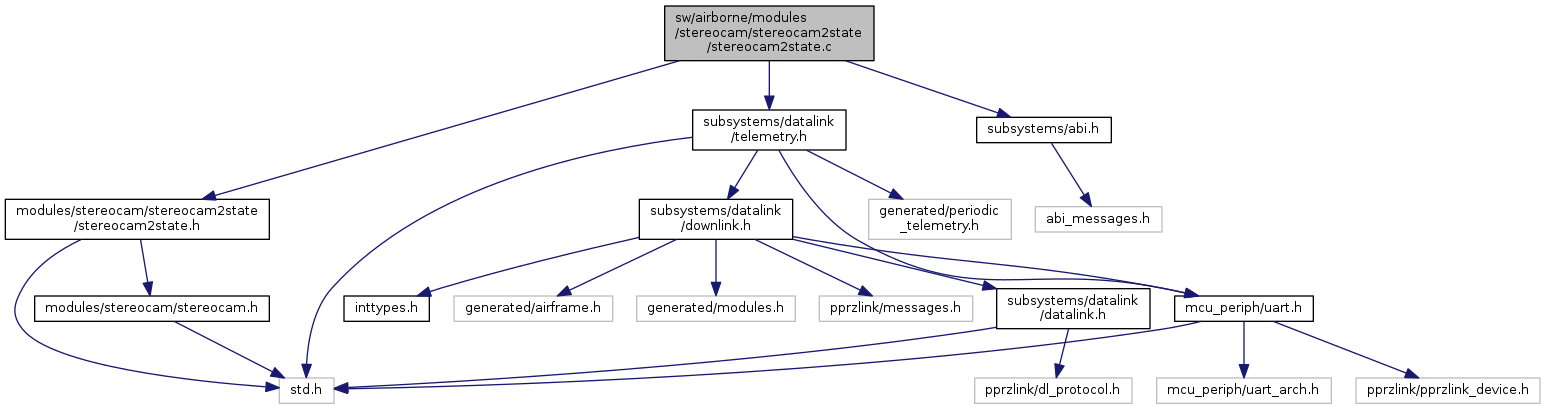
#include "modules/stereocam/stereocam2state/stereocam2state.h"#include "subsystems/abi.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for stereocam2state.c:
Include dependency graph for stereocam2state.c:Go to the source code of this file.
Macros | |
| #define | STEREOCAM2STATE_SENDER_ID ABI_BROADCAST |
| #define | STEREOCAM2STATE_RECEIVED_DATA_TYPE 0 |
Functions | |
| void | stereocam_to_state (void) |
| void | stereo_to_state_init (void) |
| void | stereo_to_state_periodic (void) |
Definition in file stereocam2state.c.
| #define STEREOCAM2STATE_RECEIVED_DATA_TYPE 0 |
Definition at line 23 of file stereocam2state.c.
| #define STEREOCAM2STATE_SENDER_ID ABI_BROADCAST |
Definition at line 19 of file stereocam2state.c.
Referenced by stereocam_to_state().
| void stereo_to_state_init | ( | void | ) |
Definition at line 30 of file stereocam2state.c.
| void stereo_to_state_periodic | ( | void | ) |
Definition at line 35 of file stereocam2state.c.
References uint8array::fresh, stereocam_data, and stereocam_to_state().
Here is the call graph for this function:| void stereocam_to_state | ( | void | ) |
Definition at line 43 of file stereocam2state.c.
References uint8array::data, DefaultChannel, DefaultDevice, get_sys_time_usec(), RES, STEREOCAM2STATE_SENDER_ID, and stereocam_data.
Referenced by stereo_to_state_periodic().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8