|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
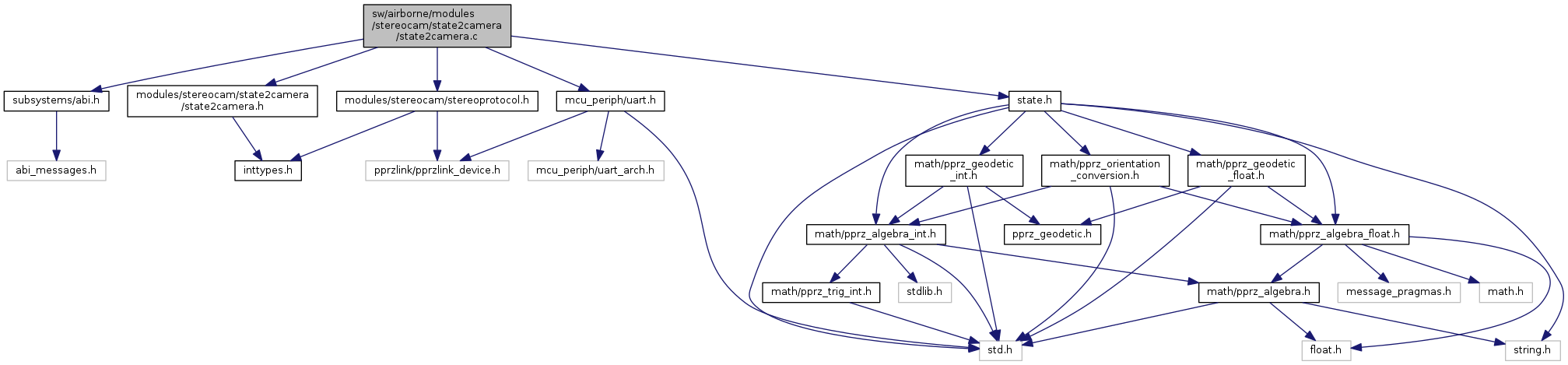
#include "modules/stereocam/state2camera/state2camera.h"#include "modules/stereocam/stereoprotocol.h"#include "subsystems/abi.h"#include "state.h"#include "mcu_periph/uart.h" Include dependency graph for state2camera.c:
Include dependency graph for state2camera.c:Go to the source code of this file.
Macros | |
| #define | STATE2CAMERA_SEND_DATA_TYPE 0 |
Functions | |
| void | write_serial_rot () |
Variables | |
| static int | frame_number_sending = 0 |
| float | lastKnownHeight = 0.0 |
| int | pleaseResetOdroid = 0 |
Definition in file state2camera.c.
| #define STATE2CAMERA_SEND_DATA_TYPE 0 |
Definition at line 36 of file state2camera.c.
| void write_serial_rot | ( | void | ) |
Definition at line 39 of file state2camera.c.
References State::alt_agl_f, frame_number_sending, Int32RMat::m, FloatEulers::phi, FloatEulers::psi, state, stateGetNedToBodyEulers_f(), stateGetNedToBodyRMat_i(), stereoprot_sendArray(), and FloatEulers::theta.
Here is the call graph for this function:
|
static |
Definition at line 31 of file state2camera.c.
Referenced by write_serial_rot().
| float lastKnownHeight = 0.0 |
Definition at line 32 of file state2camera.c.
| int pleaseResetOdroid = 0 |
Definition at line 33 of file state2camera.c.
 1.8.8
1.8.8