|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Fly By Wire: More...
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | STATIC_INLINE static inline |
| #define | RC_LOST_FBW_MODE FBW_MODE_FAILSAFE |
| mode to enter when RC is lost while using a mode with RC input More... | |
| #define | RC_LOST_IN_AUTO_FBW_MODE FBW_MODE_AUTO |
| mode to enter when AP is lost while using autopilot More... | |
| #define | AP_LOST_FBW_MODE FBW_MODE_FAILSAFE |
| mode to enter when AP is lost while using autopilot More... | |
| #define | RADIO_FBW_MODE RADIO_MODE |
| Switching between FBW and autopilot is done with RADIO_FBW_MODE: default is to re-use RADIO_MODE. More... | |
Functions | |
| STATIC_INLINE void | main_init (void) |
| Main initialization. More... | |
| STATIC_INLINE void | main_event (void) |
| STATIC_INLINE void | handle_periodic_tasks (void) |
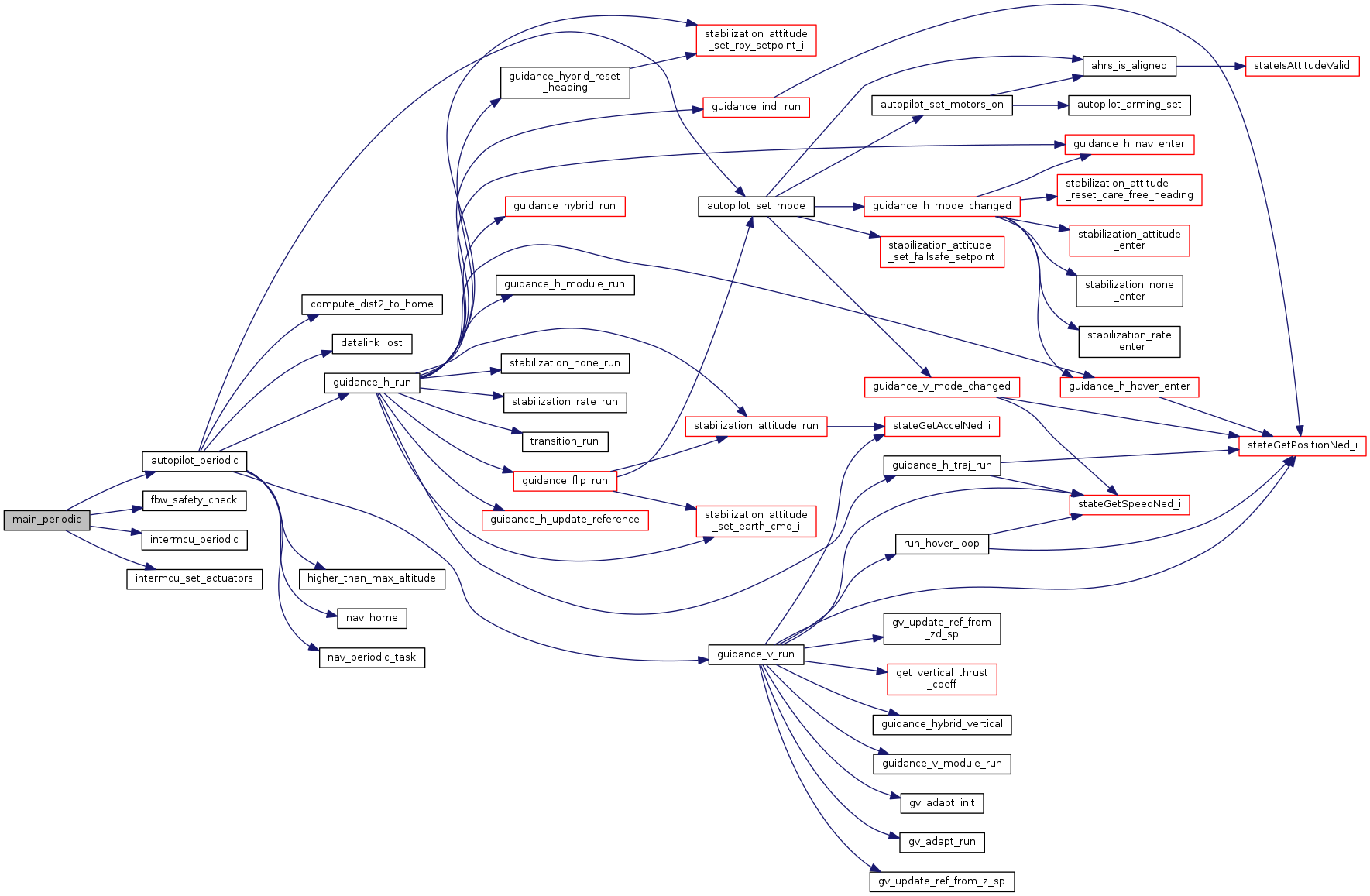
| STATIC_INLINE void | main_periodic (void) |
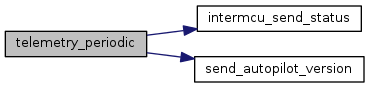
| STATIC_INLINE void | telemetry_periodic (void) |
Fly By Wire:
Reads Radiocontrol Reads Intermcu Sets Actuators
if no rc but autopilot then RC_LOST_FBW_MODE (define below) if no rc while in auto mode then RC_LOST_IN_AUTO_FBW_MODE (define below) if no ap but rc then AP_LOST_FBW_MODE (define below)
Definition in file main_fbw.h.
| #define AP_LOST_FBW_MODE FBW_MODE_FAILSAFE |
mode to enter when AP is lost while using autopilot
Definition at line 57 of file main_fbw.h.
Referenced by fbw_on_rc_frame(), and fbw_safety_check().
| #define RADIO_FBW_MODE RADIO_MODE |
Switching between FBW and autopilot is done with RADIO_FBW_MODE: default is to re-use RADIO_MODE.
Definition at line 64 of file main_fbw.h.
Referenced by fbw_on_rc_frame().
| #define RC_LOST_FBW_MODE FBW_MODE_FAILSAFE |
mode to enter when RC is lost while using a mode with RC input
Definition at line 47 of file main_fbw.h.
Referenced by fbw_safety_check().
| #define RC_LOST_IN_AUTO_FBW_MODE FBW_MODE_AUTO |
mode to enter when AP is lost while using autopilot
Definition at line 52 of file main_fbw.h.
Referenced by fbw_safety_check().
| #define STATIC_INLINE static inline |
Definition at line 42 of file main_fbw.h.
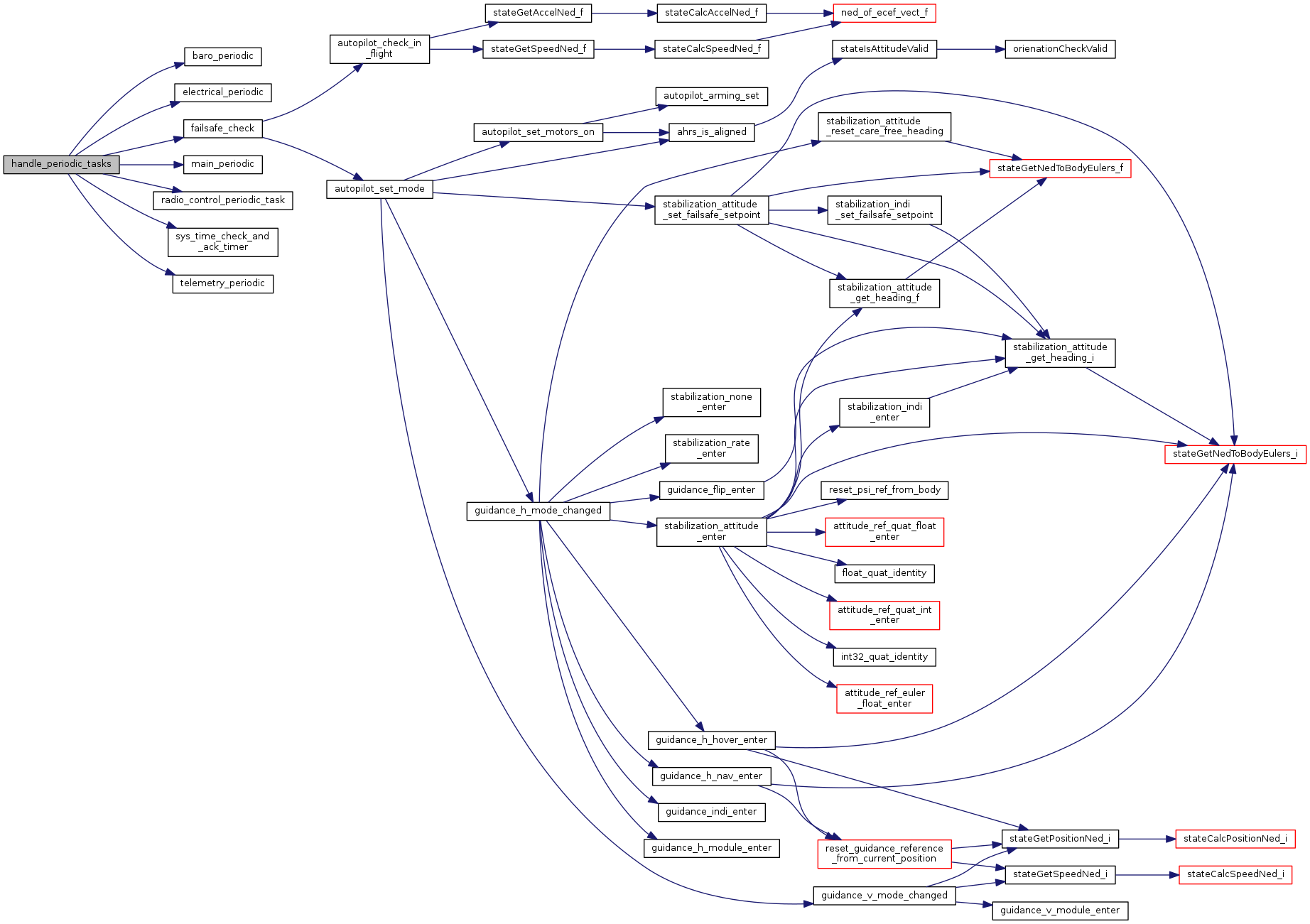
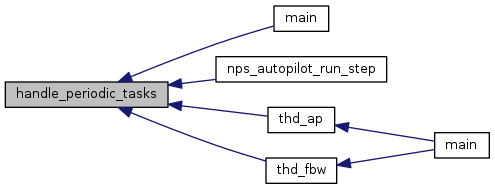
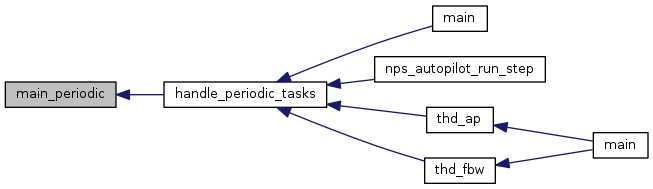
| STATIC_INLINE void handle_periodic_tasks | ( | void | ) |
Definition at line 243 of file main.c.
References baro_periodic(), electrical_periodic(), electrical_tid, failsafe_check(), main_periodic(), main_periodic_tid, modules_tid, radio_control_periodic_task(), radio_control_tid, sys_time_check_and_ack_timer(), telemetry_periodic(), and telemetry_tid.
Referenced by main(), nps_autopilot_run_step(), thd_ap(), and thd_fbw().
Here is the call graph for this function: Here is the caller graph for this function:
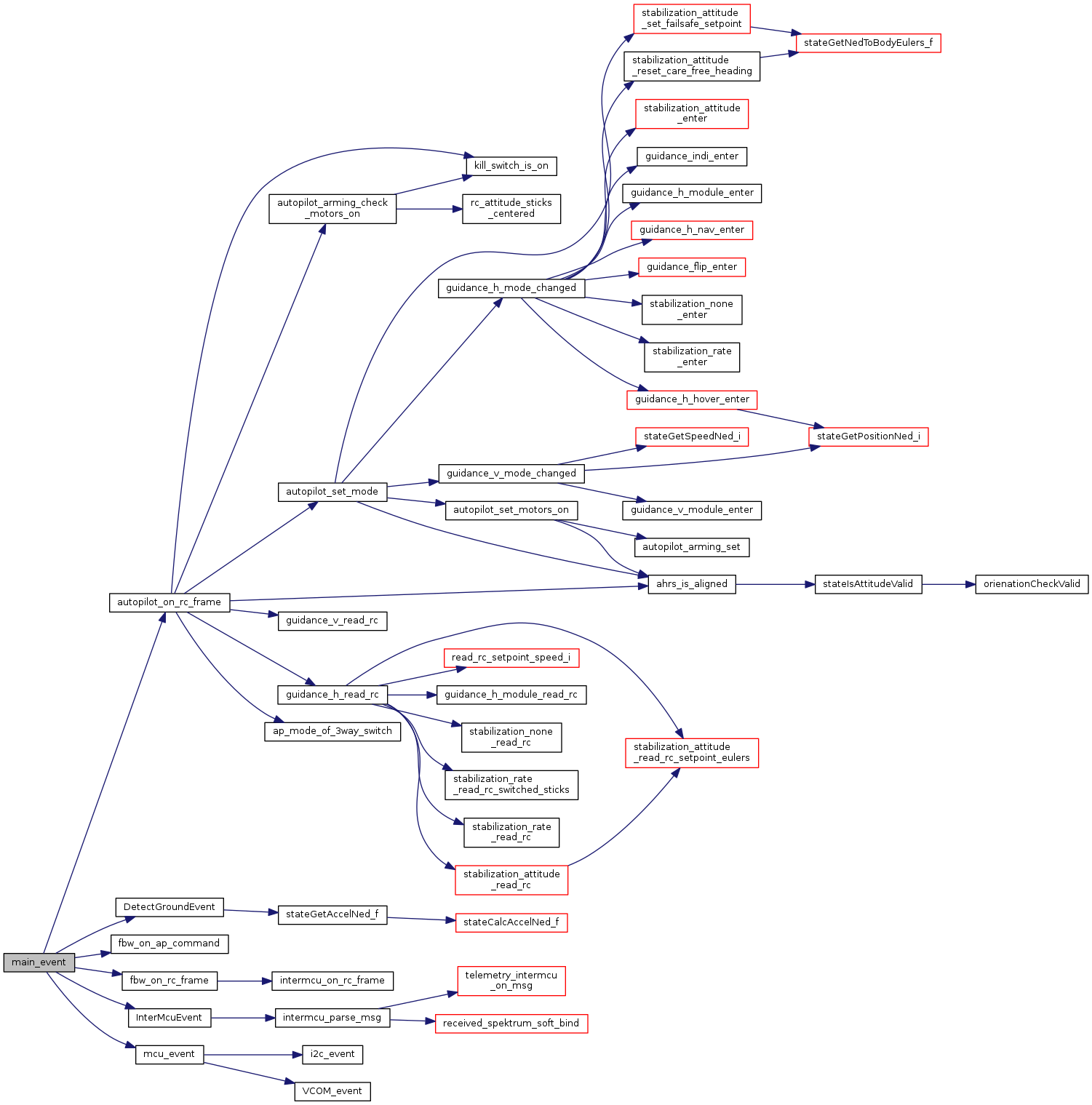
|
inline |
Definition at line 357 of file main.c.
References autopilot_on_rc_frame(), autopilot_rc, BaroEvent, DatalinkEvent, DetectGroundEvent(), fbw_on_ap_command(), fbw_on_rc_frame(), InterMcuEvent(), mcu_event(), and RadioControlEvent.
Referenced by main().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
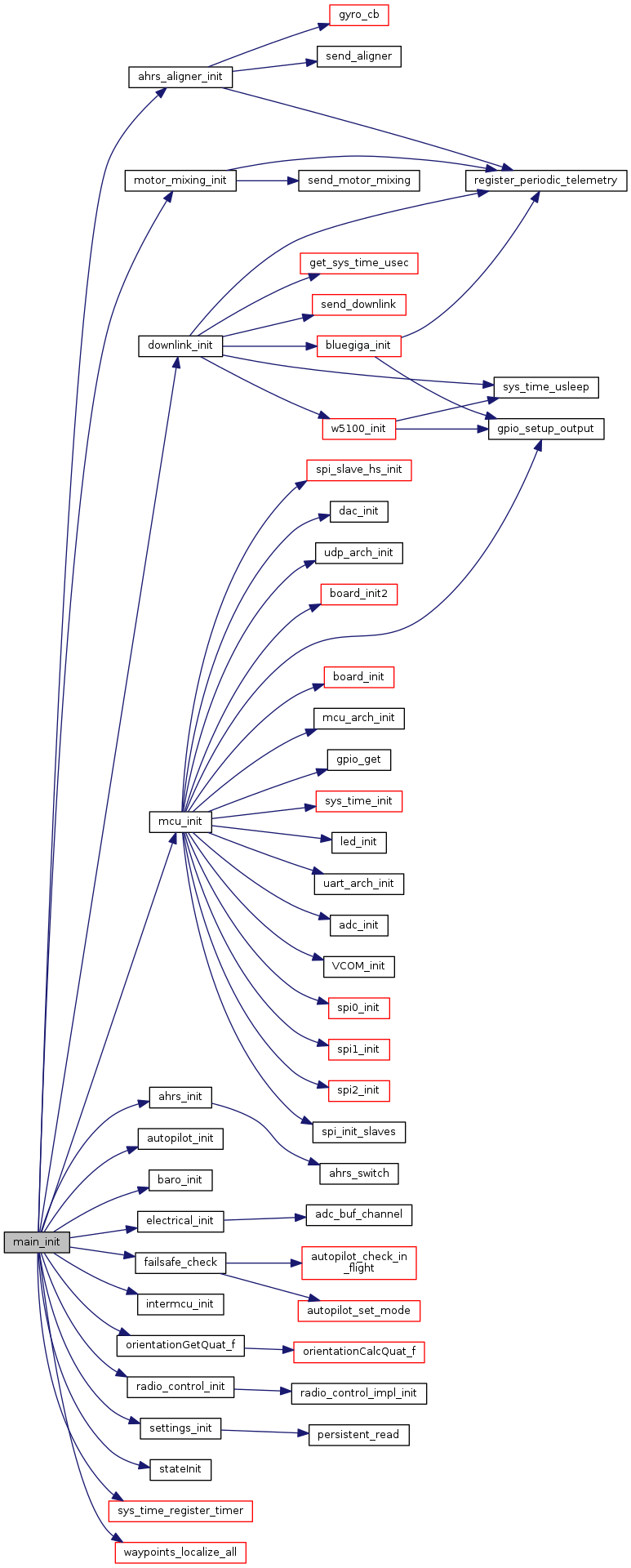
Main initialization.
Definition at line 162 of file main.c.
References ahrs_aligner_init(), ahrs_init(), autopilot_init(), baro_init(), BARO_PERIODIC_FREQUENCY, Imu::body_to_imu, downlink_init(), electrical_init(), electrical_tid, failsafe_check(), fbw_mode, FBW_MODE_FAILSAFE, imu, intermcu_init(), main_periodic_tid, mcu_init(), mcu_int_enable, modules_tid, motor_mixing_init(), orientationGetQuat_f(), radio_control_init(), radio_control_tid, settings_init(), stateInit(), sys_time_register_timer(), TELEMETRY_FREQUENCY, telemetry_tid, and waypoints_localize_all().
Referenced by main().
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Definition at line 270 of file main.c.
References autopilot_flight_time, autopilot_in_flight, autopilot_mode, autopilot_motors_on, autopilot_periodic(), commands, commands_failsafe, datalink_time, fbw_mode, FBW_MODE_AUTO, FBW_MODE_FAILSAFE, FBW_MODE_MANUAL, fbw_motors_on, fbw_safety_check(), intermcu, intermcu_periodic(), intermcu_set_actuators(), LED_OFF, LED_ON, LED_PERIODIC, LED_TOGGLE, PPRZ_BAUD, and SetCommands.
Referenced by handle_periodic_tasks().
Here is the call graph for this function: Here is the caller graph for this function:| STATIC_INLINE void telemetry_periodic | ( | void | ) |
Definition at line 294 of file main.c.
References DefaultChannel, DefaultDevice, DefaultPeriodic, fbw_mode, intermcu_send_status(), and send_autopilot_version().
Referenced by handle_periodic_tasks().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8