|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
driver for the optical flow sensor PX4FLOW More...
#include "std.h" Include dependency graph for px4flow.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for px4flow.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | mavlink_optical_flow |
| Mavlink optical flow structure. More... | |
Functions | |
| void | px4flow_init (void) |
| Initialization function. More... | |
| void | px4flow_downlink (void) |
| Downlink message for debug. More... | |
Variables | |
| struct mavlink_optical_flow | optical_flow |
| bool | optical_flow_available |
driver for the optical flow sensor PX4FLOW
Sensor from the PIXHAWK project
Definition in file px4flow.h.
| struct mavlink_optical_flow |
Mavlink optical flow structure.
Using MAVLINK v1.0 generated code: Message ID 100 Fields are ordered to guarentee alignment
| Data Fields | ||
|---|---|---|
| float | flow_comp_m_x | Flow in meters in x-sensor direction, angular-speed compensated. |
| float | flow_comp_m_y | Flow in meters in y-sensor direction, angular-speed compensated. |
| int16_t | flow_x | Flow in pixels in x-sensor direction. |
| int16_t | flow_y | Flow in pixels in y-sensor direction. |
| float | ground_distance | Ground distance in meters. Positive value: distance known. Negative value: Unknown distance. |
| uint8_t | quality | Optical flow quality / confidence. 0: bad, 255: maximum quality. |
| uint8_t | sensor_id | Sensor ID. |
| uint64_t | time_usec | Timestamp (UNIX) |
| void px4flow_downlink | ( | void | ) |
Downlink message for debug.
Definition at line 83 of file px4flow.c.
References DefaultChannel, DefaultDevice, mavlink_optical_flow::flow_comp_m_x, mavlink_optical_flow::flow_comp_m_y, mavlink_optical_flow::flow_x, mavlink_optical_flow::flow_y, mavlink_optical_flow::ground_distance, optical_flow, mavlink_optical_flow::quality, and mavlink_optical_flow::sensor_id.
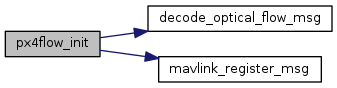
| void px4flow_init | ( | void | ) |
Initialization function.
Definition at line 64 of file px4flow.c.
References mavlink_msg_req::callback, decode_optical_flow_msg(), MAVLINK_OPTICAL_FLOW_MSG_ID, mavlink_register_msg(), mavlink_tp, mavlink_msg_req::msg, mavlink_msg_req::msg_id, optical_flow, optical_flow_available, mavlink_message::payload, and req.
Here is the call graph for this function:| struct mavlink_optical_flow optical_flow |
Definition at line 33 of file px4flow.c.
Referenced by decode_optical_flow_msg(), px4flow_downlink(), and px4flow_init().
| bool optical_flow_available |
Definition at line 34 of file px4flow.c.
Referenced by decode_optical_flow_msg(), and px4flow_init().
 1.8.8
1.8.8