|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
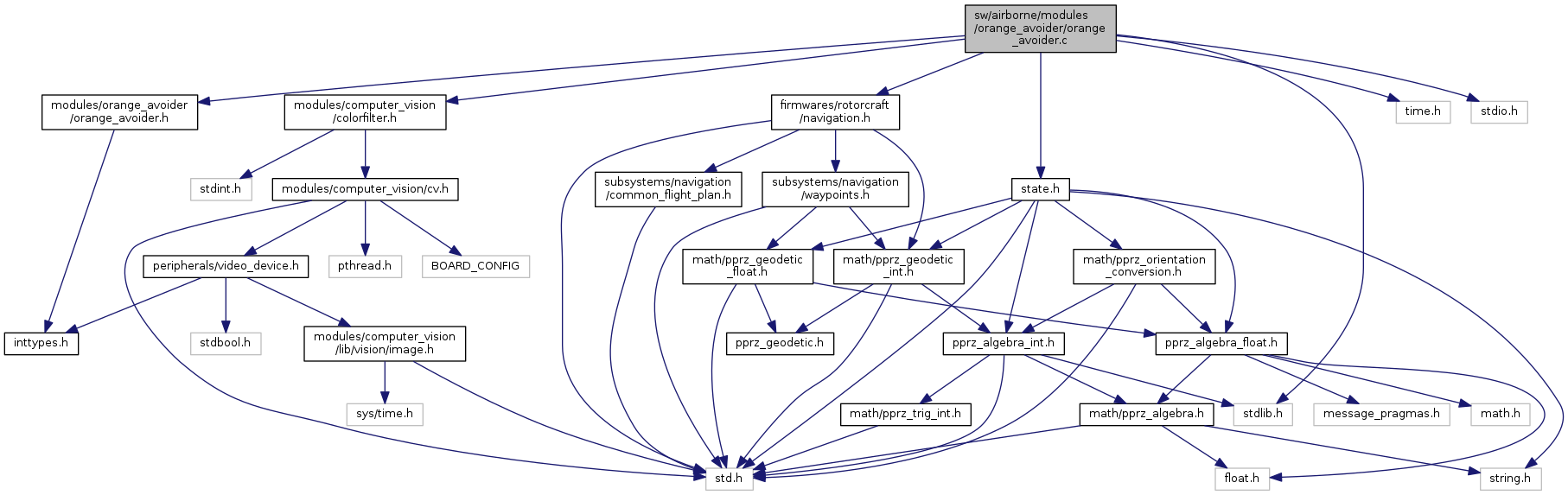
#include "modules/orange_avoider/orange_avoider.h"#include "modules/computer_vision/colorfilter.h"#include "firmwares/rotorcraft/navigation.h"#include "state.h"#include <time.h>#include <stdio.h>#include <stdlib.h> Include dependency graph for orange_avoider.c:
Include dependency graph for orange_avoider.c:Go to the source code of this file.
Functions | |
| void | orange_avoider_init () |
| void | orange_avoider_periodic () |
| uint8_t | increase_nav_heading (int32_t *heading, int32_t increment) |
| Increases the NAV heading. More... | |
| uint8_t | moveWaypointForwards (uint8_t waypoint, float distanceMeters) |
| uint8_t | chooseRandomIncrementAvoidance () |
Variables | |
| uint8_t | safeToGoForwards = false |
| int | tresholdColorCount = 200 |
| int32_t | incrementForAvoidance |
Definition in file orange_avoider.c.
| uint8_t chooseRandomIncrementAvoidance | ( | void | ) |
Definition at line 78 of file orange_avoider.c.
References incrementForAvoidance.
Referenced by orange_avoider_init().
Here is the caller graph for this function:Increases the NAV heading.
Assumes heading is an INT32_ANGLE. It is bound in this function.
Definition at line 51 of file orange_avoider.c.
Definition at line 58 of file orange_avoider.c.
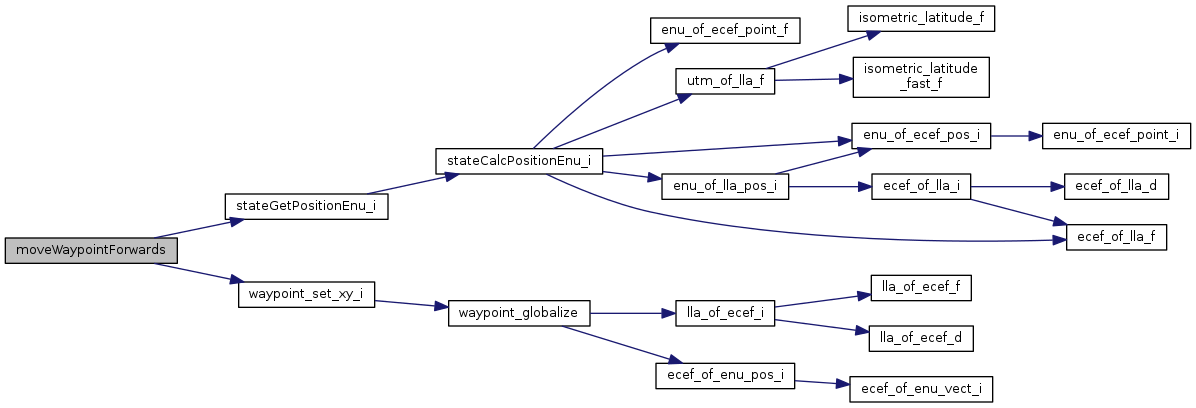
References ANGLE_FLOAT_OF_BFP, nav_heading, POS_BFP_OF_REAL, stateGetPositionEnu_i(), waypoint_set_xy_i(), EnuCoor_i::x, EnuCoor_i::y, and EnuCoor_i::z.
Here is the call graph for this function:| void orange_avoider_init | ( | void | ) |
Definition at line 25 of file orange_avoider.c.
References chooseRandomIncrementAvoidance(), color_cb_max, color_cb_min, color_cr_max, color_cr_min, color_lum_max, and color_lum_min.
Here is the call graph for this function:| void orange_avoider_periodic | ( | void | ) |
Definition at line 38 of file orange_avoider.c.
References color_count, safeToGoForwards, and tresholdColorCount.
| int32_t incrementForAvoidance |
Definition at line 23 of file orange_avoider.c.
Referenced by chooseRandomIncrementAvoidance().
| uint8_t safeToGoForwards = false |
Definition at line 21 of file orange_avoider.c.
Referenced by orange_avoider_periodic().
| int tresholdColorCount = 200 |
Definition at line 22 of file orange_avoider.c.
Referenced by orange_avoider_periodic().
 1.8.8
1.8.8