|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
mission planner library More...
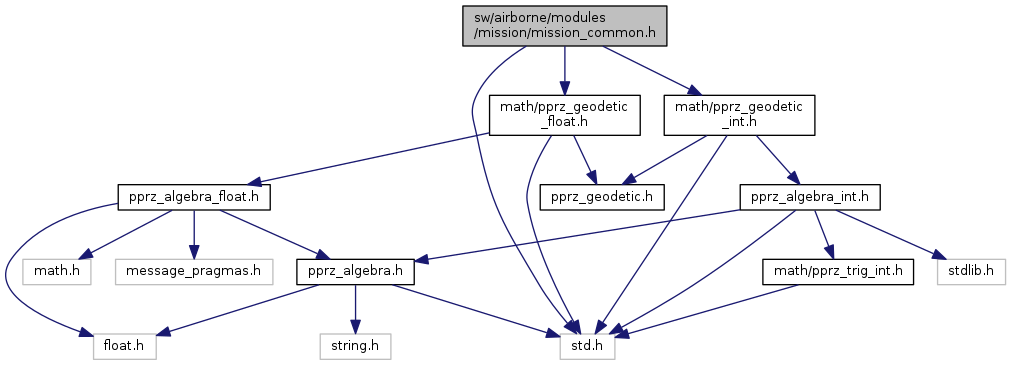
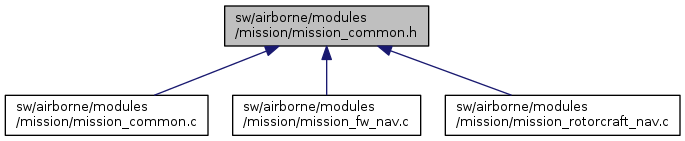
 Include dependency graph for mission_common.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for mission_common.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | _mission_wp |
| struct | _mission_circle |
| struct | _mission_segment |
| struct | _mission_path |
| struct | _mission_element |
| struct | _mission |
| union | _mission_wp.wp |
| union | _mission_circle.center |
| union | _mission_segment.from |
| union | _mission_segment.to |
| union | _mission_path.path |
| union | _mission_element.element |
Macros | |
| #define | MISSION_PATH_NB 5 |
| #define | MISSION_ELEMENT_NB 20 |
| Max number of elements in the tasks' list can be redefined. More... | |
Enumerations | |
| enum | MissionType { MissionWP = 1, MissionCircle = 2, MissionSegment = 3, MissionPath = 4, MissionSurvey = 5, MissionEight = 6, MissionOval = 7 } |
| enum | MissionInsertMode { Append, Prepend, ReplaceCurrent, ReplaceAll } |
Functions | |
| void | mission_init (void) |
| Init mission structure. More... | |
| bool | mission_insert (enum MissionInsertMode insert, struct _mission_element *element) |
| Insert a mission element according to the insertion mode. More... | |
| bool | mission_element_convert (struct _mission_element *el) |
| Convert mission element's points format if needed. More... | |
| struct _mission_element * | mission_get (void) |
| Get current mission element. More... | |
| bool | mission_point_of_lla (struct EnuCoor_f *point, struct LlaCoor_i *lla) |
| Get the ENU component of LLA mission point This function is firmware specific. More... | |
| int | mission_run (void) |
| Run mission. More... | |
| void | mission_status_report (void) |
| Report mission status. More... | |
| int | mission_parse_GOTO_WP (void) |
| Parsing functions called when a mission message is received. More... | |
| int | mission_parse_GOTO_WP_LLA (void) |
| int | mission_parse_CIRCLE (void) |
| int | mission_parse_CIRCLE_LLA (void) |
| int | mission_parse_SEGMENT (void) |
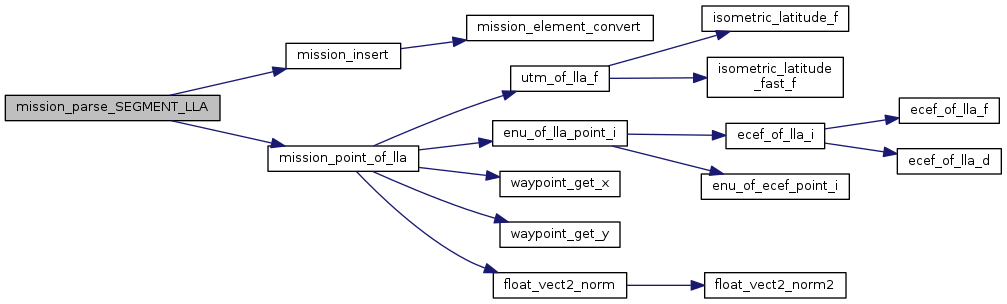
| int | mission_parse_SEGMENT_LLA (void) |
| int | mission_parse_PATH (void) |
| int | mission_parse_PATH_LLA (void) |
| int | mission_parse_SURVEY (void) |
| int | mission_parse_SURVEY_LLA (void) |
| int | mission_parse_GOTO_MISSION (void) |
| int | mission_parse_NEXT_MISSION (void) |
| int | mission_parse_END_MISSION (void) |
Variables | |
| struct _mission | mission |
mission planner library
Provide the generic interface for the mission control Handle the parsing of datalink messages
Definition in file mission_common.h.
| struct _mission_wp |
Definition at line 54 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| union _mission_wp | wp | |
| struct _mission_circle |
Definition at line 61 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| union _mission_circle | center | |
| float | radius | |
| struct _mission_segment |
Definition at line 70 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| union _mission_segment | from | |
| union _mission_segment | to | |
| struct _mission_path |
Definition at line 83 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| uint8_t | nb | |
| union _mission_path | path | |
| uint8_t | path_idx | |
| struct _mission_element |
Definition at line 93 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| float | duration | time to spend in the element (<= 0 to disable) |
| union _mission_element | element | |
| enum MissionType | type | |
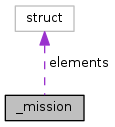
| struct _mission |
Definition at line 112 of file mission_common.h.
Collaboration diagram for _mission:| Data Fields | ||
|---|---|---|
| uint8_t | current_idx | current mission element index |
| float | element_time | time in second spend in the current element |
| struct _mission_element | elements[MISSION_ELEMENT_NB] | |
| uint8_t | insert_idx | inserstion index |
| union _mission_wp.wp |
Definition at line 55 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | wp_f | |
| struct EnuCoor_i | wp_i | |
| union _mission_circle.center |
Definition at line 62 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | center_f | |
| struct EnuCoor_i | center_i | |
| union _mission_segment.from |
Definition at line 71 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | from_f | |
| struct EnuCoor_i | from_i | |
| union _mission_segment.to |
Definition at line 76 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | to_f | |
| struct EnuCoor_i | to_i | |
| union _mission_path.path |
Definition at line 84 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | path_f[MISSION_PATH_NB] | |
| struct EnuCoor_i | path_i[MISSION_PATH_NB] | |
| union _mission_element.element |
Definition at line 95 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| struct _mission_circle | mission_circle | |
| struct _mission_path | mission_path | |
| struct _mission_segment | mission_segment | |
| struct _mission_wp | mission_wp | |
| #define MISSION_ELEMENT_NB 20 |
Max number of elements in the tasks' list can be redefined.
Definition at line 109 of file mission_common.h.
Referenced by mission_insert(), mission_parse_GOTO_MISSION(), mission_parse_NEXT_MISSION(), mission_run(), and mission_status_report().
| #define MISSION_PATH_NB 5 |
Definition at line 82 of file mission_common.h.
Referenced by mission_parse_PATH(), and mission_parse_PATH_LLA().
| enum MissionInsertMode |
| Enumerator | |
|---|---|
| Append |
add at the last position |
| Prepend |
add before the current element |
| ReplaceCurrent |
replace current element |
| ReplaceAll |
remove all elements and add the new one |
Definition at line 47 of file mission_common.h.
| enum MissionType |
| Enumerator | |
|---|---|
| MissionWP | |
| MissionCircle | |
| MissionSegment | |
| MissionPath | |
| MissionSurvey | |
| MissionEight | |
| MissionOval | |
Definition at line 37 of file mission_common.h.
| bool mission_element_convert | ( | struct _mission_element * | el | ) |
Convert mission element's points format if needed.
| el | pointer to the mission element |
Definition at line 87 of file mission_common.c.
References _mission_element::element, ENU_BFP_OF_REAL, MissionCircle, MissionPath, MissionSegment, MissionWP, and _mission_element::type.
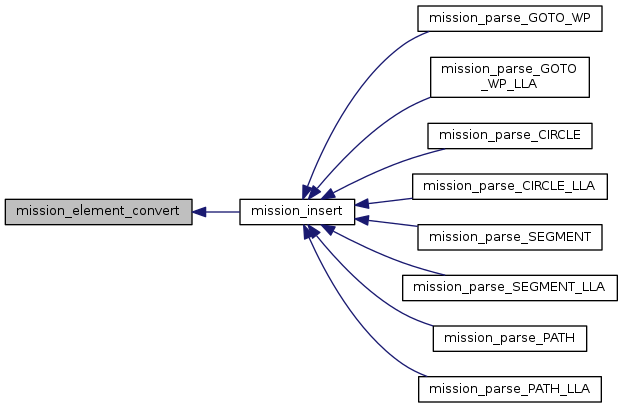
Referenced by mission_insert().
Here is the caller graph for this function:| struct _mission_element* mission_get | ( | void | ) |
Get current mission element.
Definition at line 91 of file mission_common.c.
References _mission::current_idx, _mission::elements, _mission::insert_idx, and mission.
Referenced by mission_run().
Here is the caller graph for this function:| void mission_init | ( | void | ) |
Init mission structure.
Definition at line 38 of file mission_common.c.
References _mission::current_idx, _mission::element_time, _mission::insert_idx, and mission.
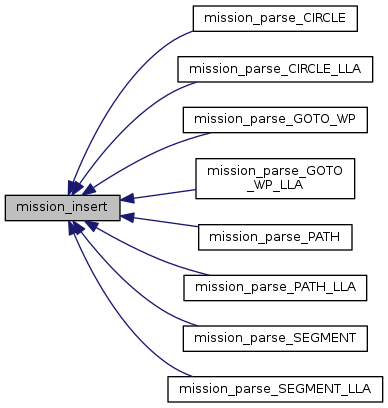
| bool mission_insert | ( | enum MissionInsertMode | insert, |
| struct _mission_element * | element | ||
| ) |
Insert a mission element according to the insertion mode.
| insert | insertion mode |
| element | mission element structure |
Definition at line 47 of file mission_common.c.
References Append, _mission::current_idx, _mission::elements, _mission::insert_idx, mission, mission_element_convert(), MISSION_ELEMENT_NB, Prepend, ReplaceAll, and ReplaceCurrent.
Referenced by mission_parse_CIRCLE(), mission_parse_CIRCLE_LLA(), mission_parse_GOTO_WP(), mission_parse_GOTO_WP_LLA(), mission_parse_PATH(), mission_parse_PATH_LLA(), mission_parse_SEGMENT(), and mission_parse_SEGMENT_LLA().
Here is the call graph for this function: Here is the caller graph for this function:| int mission_parse_CIRCLE | ( | void | ) |
Definition at line 162 of file mission_common.c.
References dl_buffer, _mission_element::duration, _mission_element::element, mission_insert(), MissionCircle, and _mission_element::type.
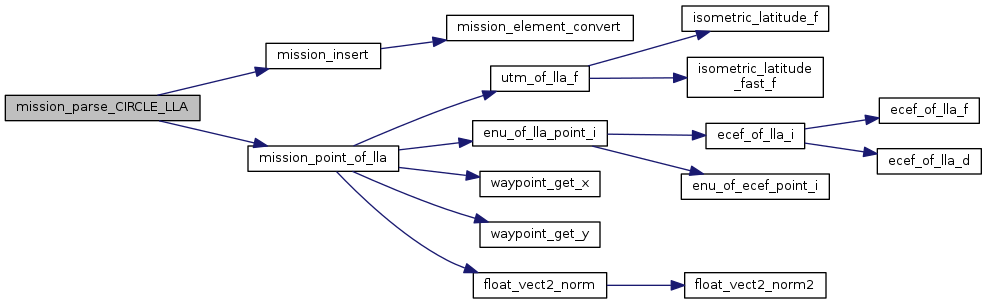
Here is the call graph for this function:| int mission_parse_CIRCLE_LLA | ( | void | ) |
Definition at line 179 of file mission_common.c.
References LlaCoor_i::alt, dl_buffer, _mission_element::duration, _mission_element::element, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), mission_point_of_lla(), MissionCircle, and _mission_element::type.
Here is the call graph for this function:| int mission_parse_END_MISSION | ( | void | ) |
Definition at line 335 of file mission_common.c.
References _mission::current_idx, dl_buffer, _mission::insert_idx, and mission.
| int mission_parse_GOTO_MISSION | ( | void | ) |
Definition at line 312 of file mission_common.c.
References _mission::current_idx, dl_buffer, mission, and MISSION_ELEMENT_NB.
| int mission_parse_GOTO_WP | ( | void | ) |
Parsing functions called when a mission message is received.
Definition at line 126 of file mission_common.c.
References dl_buffer, _mission_element::duration, _mission_element::element, mission_insert(), MissionWP, and _mission_element::type.
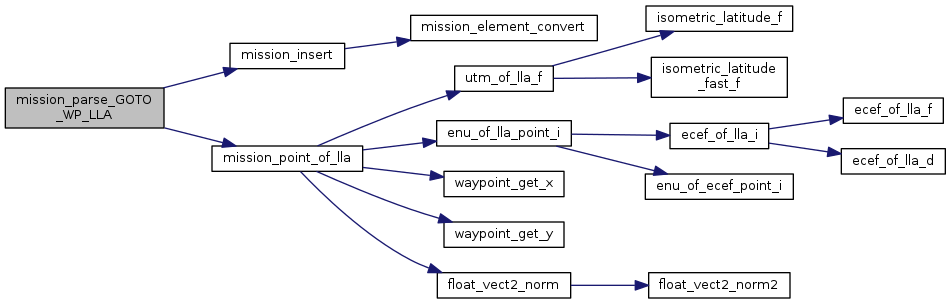
Here is the call graph for this function:| int mission_parse_GOTO_WP_LLA | ( | void | ) |
Definition at line 142 of file mission_common.c.
References LlaCoor_i::alt, dl_buffer, _mission_element::duration, _mission_element::element, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), mission_point_of_lla(), MissionWP, and _mission_element::type.
Here is the call graph for this function:| int mission_parse_NEXT_MISSION | ( | void | ) |
Definition at line 324 of file mission_common.c.
References _mission::current_idx, dl_buffer, _mission::insert_idx, mission, and MISSION_ELEMENT_NB.
| int mission_parse_PATH | ( | void | ) |
Definition at line 243 of file mission_common.c.
References dl_buffer, _mission_element::duration, _mission_element::element, mission_insert(), MISSION_PATH_NB, MissionPath, and _mission_element::type.
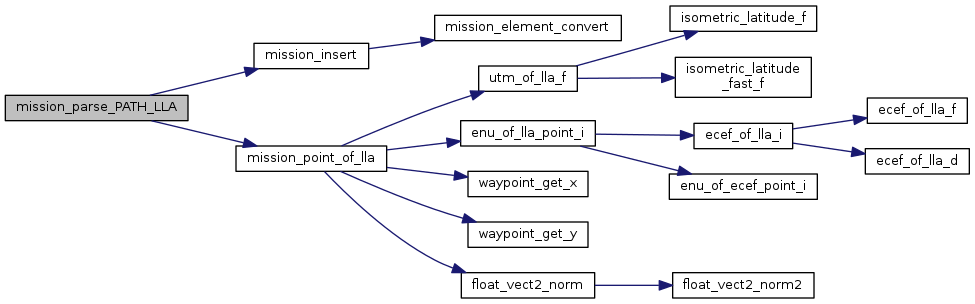
Here is the call graph for this function:| int mission_parse_PATH_LLA | ( | void | ) |
Definition at line 274 of file mission_common.c.
References LlaCoor_i::alt, dl_buffer, _mission_element::duration, _mission_element::element, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), MISSION_PATH_NB, mission_point_of_lla(), MissionPath, and _mission_element::type.
Here is the call graph for this function:| int mission_parse_SEGMENT | ( | void | ) |
Definition at line 200 of file mission_common.c.
References dl_buffer, _mission_element::duration, _mission_element::element, mission_insert(), MissionSegment, and _mission_element::type.
Here is the call graph for this function:| int mission_parse_SEGMENT_LLA | ( | void | ) |
Definition at line 219 of file mission_common.c.
References LlaCoor_i::alt, dl_buffer, _mission_element::duration, _mission_element::element, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), mission_point_of_lla(), MissionSegment, and _mission_element::type.
Here is the call graph for this function:| int mission_parse_SURVEY | ( | void | ) |
| int mission_parse_SURVEY_LLA | ( | void | ) |
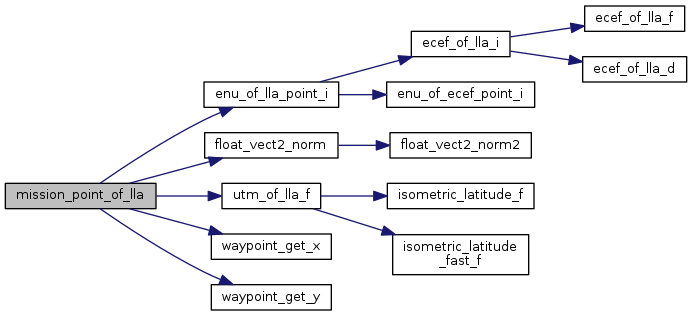
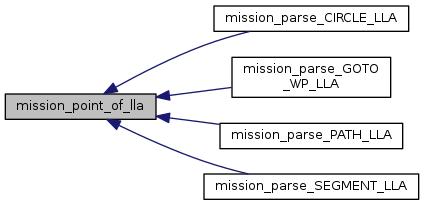
Get the ENU component of LLA mission point This function is firmware specific.
| point | pointer to the output ENU point (float) |
| lla | pointer to the input LLA coordinates (int) |
Get the ENU component of LLA mission point This function is firmware specific.
TODO: don't convert to float, either use double or do completely in fixed point
Definition at line 38 of file mission_fw_nav.c.
References LlaCoor_i::alt, BUFFER_ZONE_DIST, UtmCoor_f::east, enu_of_lla_point_i(), float_vect2_norm(), LtpDef_i::hmsl, LtpDef_i::lla, LLA_FLOAT_OF_BFP, max_dist_from_home, nav_utm_east0, nav_utm_north0, nav_utm_zone0, State::ned_initialized_i, State::ned_origin_i, UtmCoor_f::north, state, utm_of_lla_f(), VECT2_DIFF, VECT2_SMUL, VECT2_SUM, VECT3_SMUL, waypoint_get_x(), waypoint_get_y(), waypoints, point::x, FloatVect2::x, EnuCoor_f::x, point::y, FloatVect2::y, EnuCoor_f::y, EnuCoor_f::z, and UtmCoor_f::zone.
Referenced by mission_parse_CIRCLE_LLA(), mission_parse_GOTO_WP_LLA(), mission_parse_PATH_LLA(), and mission_parse_SEGMENT_LLA().
Here is the call graph for this function: Here is the caller graph for this function:| int mission_run | ( | void | ) |
Run mission.
This function should be implemented into a dedicated file since navigation functions are different for different firmwares
Currently, this function should be called from the flight plan
Definition at line 142 of file mission_fw_nav.c.
References _mission::current_idx, dt_navigation, _mission_element::duration, _mission_element::element, _mission::element_time, mission, MISSION_ELEMENT_NB, mission_get(), mission_nav_circle(), mission_nav_path(), mission_nav_segment(), mission_nav_wp(), MissionCircle, MissionPath, MissionSegment, MissionWP, and _mission_element::type.
Here is the call graph for this function:| void mission_status_report | ( | void | ) |
Report mission status.
Send mission status over datalink
Definition at line 101 of file mission_common.c.
References _mission::current_idx, DefaultChannel, DefaultDevice, _mission_element::duration, _mission::element_time, _mission::elements, _mission::insert_idx, mission, MISSION_ELEMENT_NB, and _mission_element::type.
| struct _mission mission |
Definition at line 36 of file mission_common.c.
Referenced by mission_get(), mission_init(), mission_insert(), mission_nav_circle(), mission_parse_END_MISSION(), mission_parse_GOTO_MISSION(), mission_parse_NEXT_MISSION(), mission_run(), and mission_status_report().
 1.8.8
1.8.8