|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Rotorcraft Inter-MCU on FlyByWire. More...
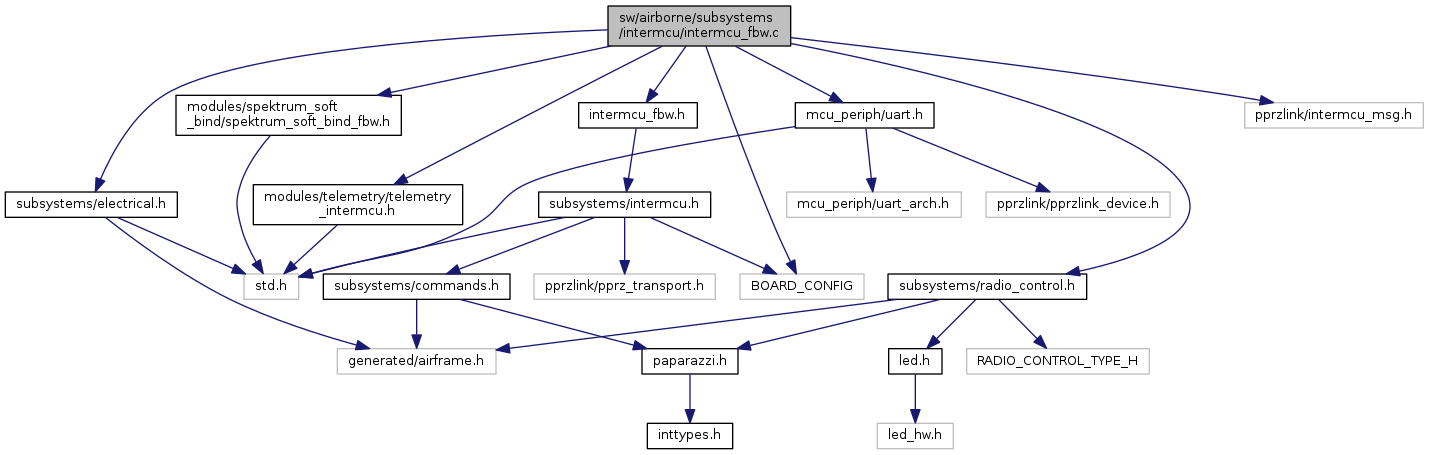
#include "intermcu_fbw.h"#include "pprzlink/intermcu_msg.h"#include "subsystems/radio_control.h"#include "subsystems/electrical.h"#include "mcu_periph/uart.h"#include "modules/telemetry/telemetry_intermcu.h"#include "modules/spektrum_soft_bind/spektrum_soft_bind_fbw.h"#include <BOARD_CONFIG> Include dependency graph for intermcu_fbw.c:
Include dependency graph for intermcu_fbw.c:Go to the source code of this file.
Functions | |
| static void | intermcu_parse_msg (void(*commands_frame_handler)(void)) |
| void | intermcu_init (void) |
| void | intermcu_periodic (void) |
| void | intermcu_on_rc_frame (uint8_t fbw_mode) |
| void | intermcu_send_status (uint8_t mode) |
| void | InterMcuEvent (void(*frame_handler)(void)) |
Variables | |
| struct intermcu_t | intermcu |
| uint8_t | imcu_msg_buf [128] |
| The InterMCU message buffer. More... | |
| pprz_t | intermcu_commands [COMMANDS_NB] |
| bool | autopilot_motors_on = false |
Rotorcraft Inter-MCU on FlyByWire.
Definition in file intermcu_fbw.c.
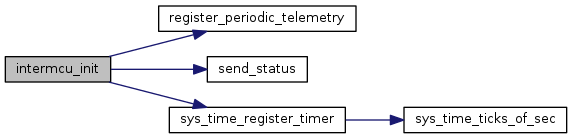
| void intermcu_init | ( | void | ) |
Definition at line 69 of file intermcu_fbw.c.
References DefaultPeriodic, register_periodic_telemetry(), send_status(), sys_time_register_timer(), and intermcu_t::transport.
Here is the call graph for this function:| void intermcu_on_rc_frame | ( | uint8_t | fbw_mode | ) |
Definition at line 88 of file intermcu_fbw.c.
References intermcu_t::device, INTERMCU_FBW, INTERMCU_RADIO_AUX1, INTERMCU_RADIO_AUX2, INTERMCU_RADIO_AUX3, INTERMCU_RADIO_KILL_SWITCH, INTERMCU_RADIO_MODE, INTERMCU_RADIO_PITCH, INTERMCU_RADIO_ROLL, INTERMCU_RADIO_THROTTLE, INTERMCU_RADIO_YAW, RADIO_AUX1, RADIO_AUX2, RADIO_AUX3, radio_control, RADIO_CONTROL_NB_CHANNEL, RADIO_KILL, RADIO_MODE, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, RADIO_YAW, intermcu_t::transport, and RadioControl::values.
Referenced by fbw_on_rc_frame().
Here is the caller graph for this function:
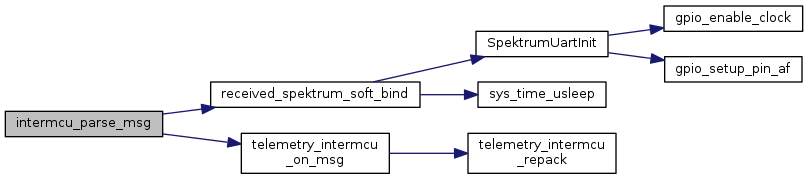
|
static |
Definition at line 130 of file intermcu_fbw.c.
References intermcu_t::cmd_status, imcu_msg_buf, INTERMCU_CLR_CMD_STATUS, INTERMCU_CMD_MOTORS_ON, INTERMCU_GET_CMD_STATUS, INTERMCU_OK, msg, received_spektrum_soft_bind(), intermcu_t::status, telemetry_intermcu_on_msg(), and intermcu_t::time_since_last_frame.
Referenced by InterMcuEvent().
Here is the call graph for this function: Here is the caller graph for this function:| void intermcu_periodic | ( | void | ) |
Definition at line 78 of file intermcu_fbw.c.
References INTERMCU_LOST, INTERMCU_LOST_CNT, intermcu_t::status, and intermcu_t::time_since_last_frame.
| void intermcu_send_status | ( | uint8_t | mode | ) |
Definition at line 121 of file intermcu_fbw.c.
References Electrical::current, intermcu_t::device, electrical, RadioControl::frame_rate, INTERMCU_FBW, radio_control, RadioControl::status, intermcu_t::transport, and Electrical::vsupply.
Referenced by telemetry_periodic().
Here is the caller graph for this function:| void InterMcuEvent | ( | void(*)(void) | frame_handler | ) |
Definition at line 175 of file intermcu_fbw.c.
References intermcu_t::device, imcu_msg_buf, intermcu_parse_msg(), intermcu_t::msg_available, and intermcu_t::transport.
Referenced by main_event().
Here is the call graph for this function: Here is the caller graph for this function:| bool autopilot_motors_on = false |
Definition at line 62 of file intermcu_fbw.c.
| uint8_t imcu_msg_buf[128] |
The InterMCU message buffer.
Definition at line 59 of file intermcu_fbw.c.
Referenced by intermcu_parse_msg(), and InterMcuEvent().
| struct intermcu_t intermcu |
Definition at line 54 of file intermcu_fbw.c.
| pprz_t intermcu_commands[COMMANDS_NB] |
Definition at line 61 of file intermcu_fbw.c.
Referenced by fbw_on_ap_command().
 1.8.8
1.8.8