|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
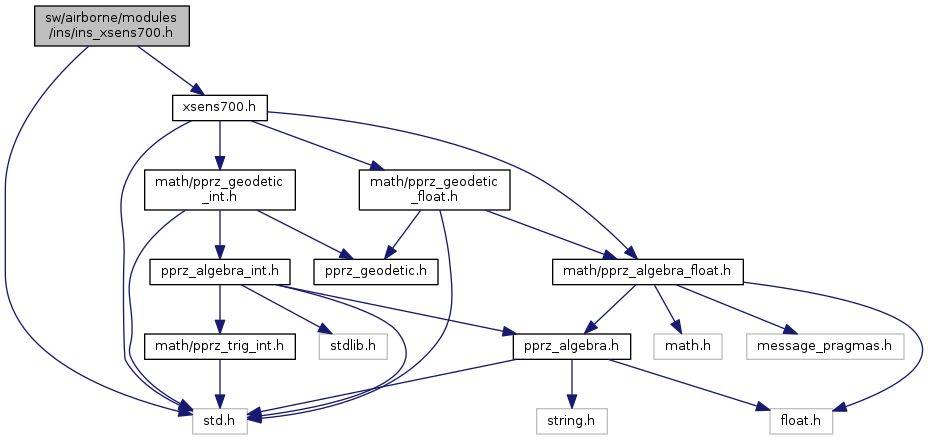
Xsens700 as a full INS solution. More...
 Include dependency graph for ins_xsens700.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins_xsens700.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | ins_xsens700_init (void) |
| void | ins_xsens700_event (void) |
Variables | |
| float | ins_pitch_neutral |
| float | ins_roll_neutral |
Xsens700 as a full INS solution.
Definition in file ins_xsens700.h.
| void ins_xsens700_event | ( | void | ) |
Definition at line 81 of file ins_xsens700.c.
References handle_ins_msg(), Xsens::msg_received, parse_xsens700_msg(), xsens700, and xsens_event().
Here is the call graph for this function:| void ins_xsens700_init | ( | void | ) |
Definition at line 67 of file ins_xsens700.c.
References gps_cb(), INS_PITCH_NEUTRAL_DEFAULT, INS_ROLL_NEUTRAL_DEFAULT, INS_XSENS700_GPS_ID, nav_utm_east0, nav_utm_north0, nav_utm_zone0, stateSetLocalUtmOrigin_f(), stateSetPositionUtm_f(), and xsens700_init().
Here is the call graph for this function:| float ins_pitch_neutral |
Definition at line 15 of file ins_arduimu.c.
| float ins_roll_neutral |
Definition at line 14 of file ins_arduimu.c.
 1.8.8
1.8.8