|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
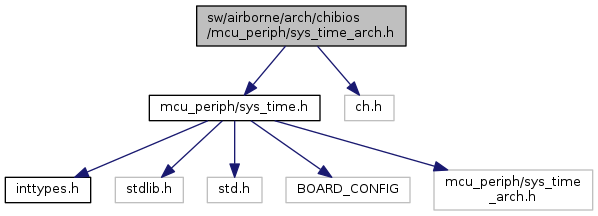
Implementation of system time functions for ChibiOS arch. More...
 Include dependency graph for sys_time_arch.h:
Include dependency graph for sys_time_arch.h:Go to the source code of this file.
Functions | |
| uint32_t | get_sys_time_usec (void) |
| Get the time in microseconds since startup. More... | |
| uint32_t | get_sys_time_msec (void) |
| void | sys_time_usleep (uint32_t us) |
| sys_time_usleep(uint32_t us) More... | |
| void | sys_time_msleep (uint16_t ms) |
| void | sys_time_ssleep (uint8_t s) |
Implementation of system time functions for ChibiOS arch.
Mostly empty functions for Paparazzi compatibility, since ChibiOS uses different system time functions.
Definition in file sys_time_arch.h.
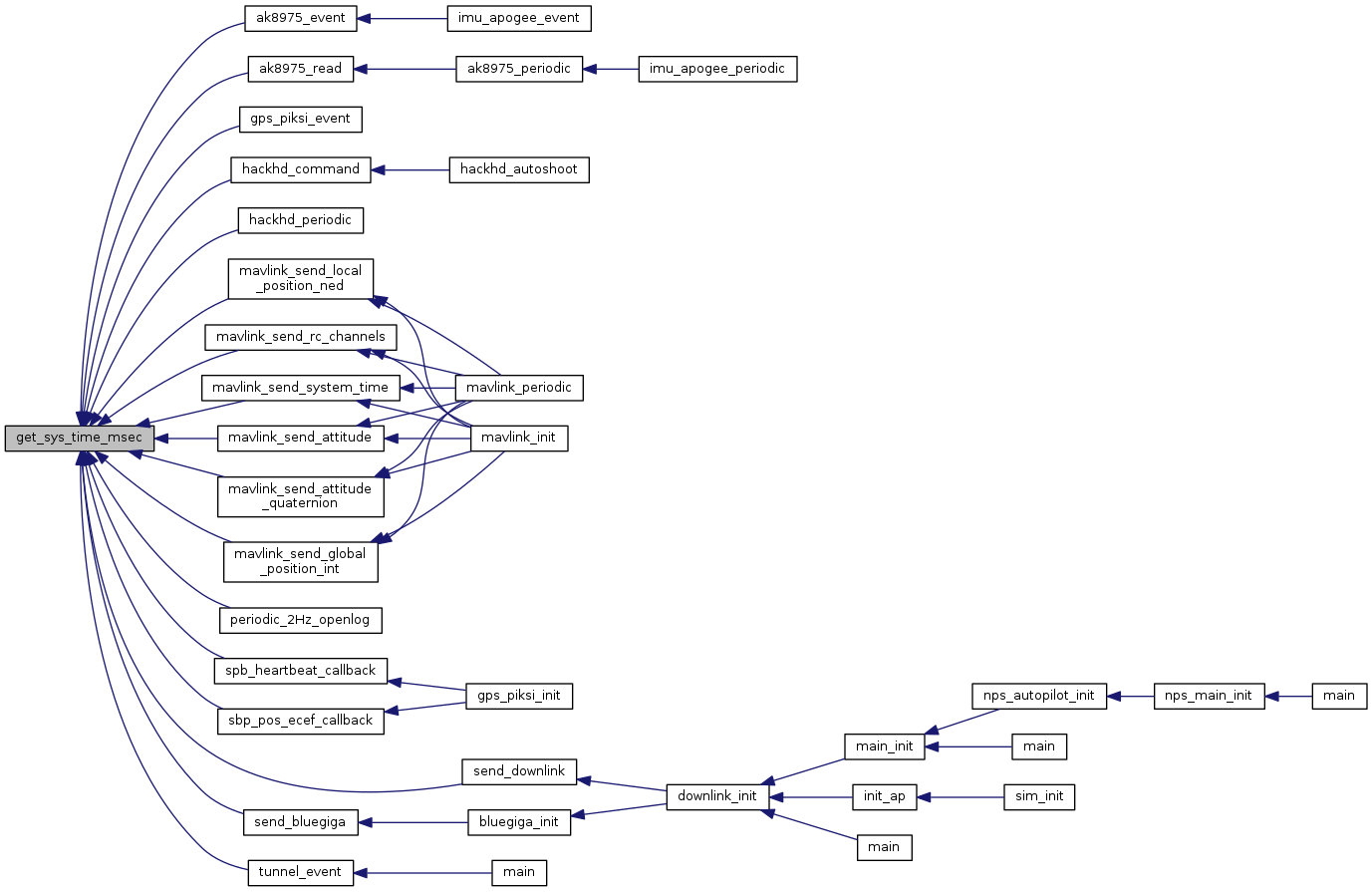
| uint32_t get_sys_time_msec | ( | void | ) |
Definition at line 78 of file sys_time_arch.c.
References msec_of_sys_time_ticks(), sys_time::nb_sec, sys_time::nb_sec_rem, and sys_time::nb_tick.
Referenced by ak8975_event(), ak8975_read(), gps_piksi_event(), hackhd_command(), hackhd_periodic(), mavlink_send_attitude(), mavlink_send_attitude_quaternion(), mavlink_send_global_position_int(), mavlink_send_local_position_ned(), mavlink_send_rc_channels(), mavlink_send_system_time(), periodic_2Hz_openlog(), sbp_pos_ecef_callback(), send_bluegiga(), send_downlink(), spb_heartbeat_callback(), and tunnel_event().
Here is the call graph for this function: Here is the caller graph for this function:| uint32_t get_sys_time_usec | ( | void | ) |
Get the time in microseconds since startup.
WARNING: overflows after 70min!
Definition at line 68 of file sys_time_arch.c.
References sys_time::nb_sec, sys_time::nb_sec_rem, sys_time::nb_tick, and usec_of_sys_time_ticks().
Referenced by ahrs_aligner_run(), ahrs_gx3_publish_imu(), downlink_init(), gps_cb(), gps_feed_value(), gps_mtk_msg(), gps_piksi_publish(), gps_sim_hitl_event(), gps_sim_publish(), gps_sirf_msg(), gps_skytraq_msg(), gps_ubx_msg(), gps_udp_parse(), handle_ins_msg(), hott_periodic_event(), imu_analog_periodic(), imu_apogee_event(), imu_aspirin2_event(), imu_aspirin_event(), imu_aspirin_i2c_event(), imu_b2_event(), imu_bebop_event(), imu_drotek2_event(), imu_gl1_event(), imu_hbmini_event(), imu_krooz_event(), imu_krooz_periodic(), imu_mpu9250_event(), imu_mpu_hmc_event(), imu_mpu_i2c_event(), imu_mpu_spi_event(), imu_navgo_event(), imu_navstik_event(), imu_nps_event(), imu_ppzuav_event(), imu_px4_event(), imu_px4fmu_event(), imu_um6_publish(), imu_umarim_event(), ins_alt_float_update_baro(), ins_alt_float_update_gps(), ins_vectornav_propagate(), mag_hmc58xx_module_event(), mag_pitot_parse_msg(), main(), mavlink_send_gps_raw_int(), navdata_publish_imu(), nmea_gps_msg(), opticflow_module_run(), parse_gps_datalink(), parse_gps_datalink_small(), pose_periodic(), send_filter_status(), stereocam_to_state(), superbitrf_event(), superbitrf_receive_packet_cb(), and v4l2_capture_thread().
Here is the call graph for this function:| void sys_time_msleep | ( | uint16_t | ms | ) |
Definition at line 101 of file sys_time_arch.c.
References CH_CFG_ST_FREQUENCY.
| void sys_time_ssleep | ( | uint8_t | s | ) |
Definition at line 107 of file sys_time_arch.c.
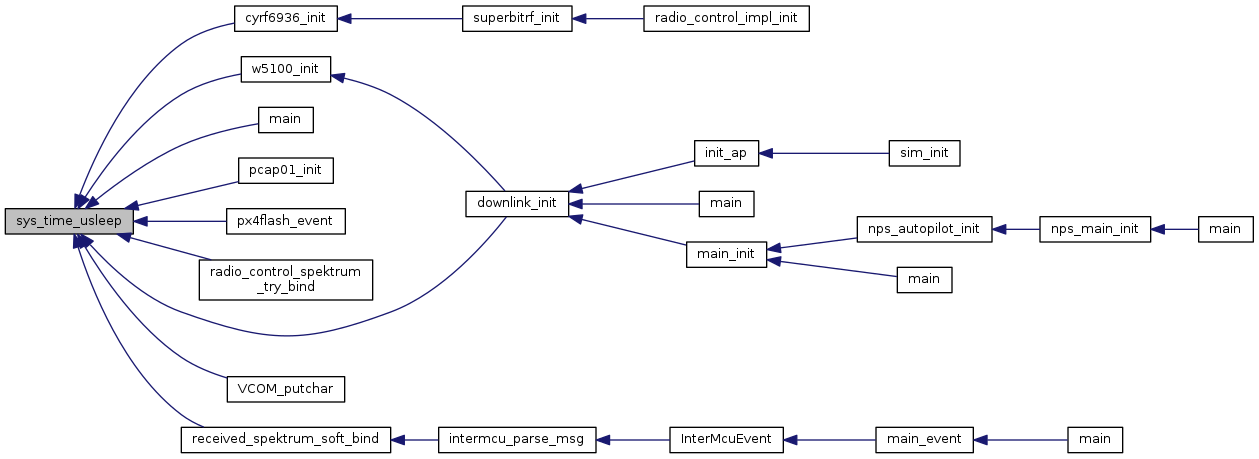
| void sys_time_usleep | ( | uint32_t | us | ) |
using intermediate 64 bits variable to avoid wrapping
max sleep time is around 10 days (2^32 / CH_CFG_ST_FREQUENCY) at 10kHz
Definition at line 95 of file sys_time_arch.c.
References CH_CFG_ST_FREQUENCY.
Referenced by cyrf6936_init(), downlink_init(), main(), pcap01_init(), px4flash_event(), radio_control_spektrum_try_bind(), received_spektrum_soft_bind(), VCOM_putchar(), and w5100_init().
Here is the caller graph for this function: 1.8.8
1.8.8