|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
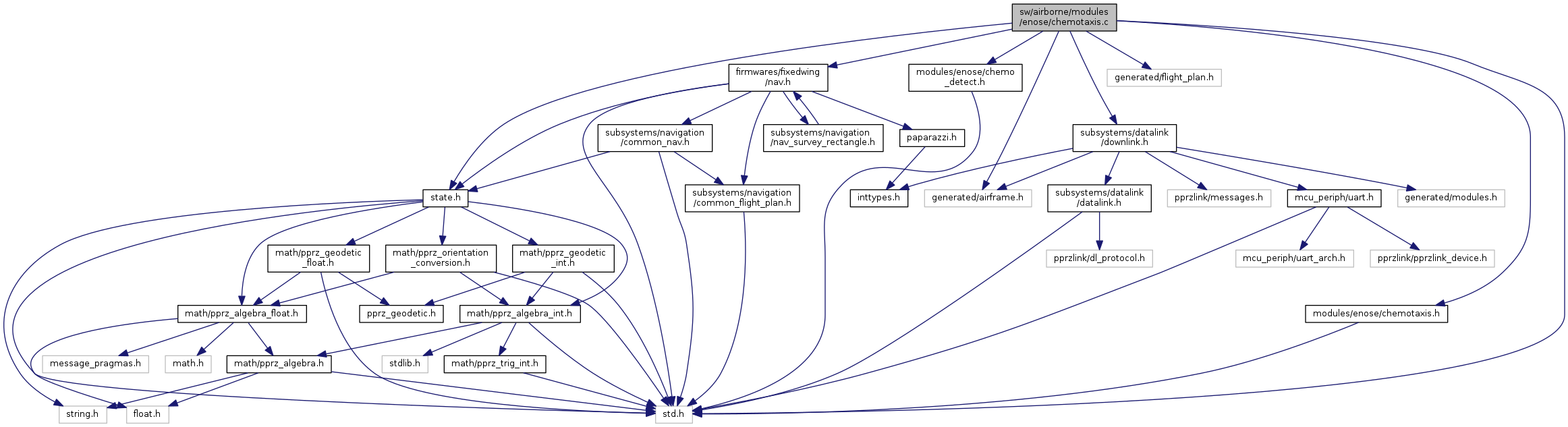
#include "modules/enose/chemotaxis.h"#include "generated/airframe.h"#include "state.h"#include "std.h"#include "firmwares/fixedwing/nav.h"#include "generated/flight_plan.h"#include "subsystems/datalink/downlink.h"#include "modules/enose/chemo_detect.h" Include dependency graph for chemotaxis.c:
Include dependency graph for chemotaxis.c:Go to the source code of this file.
Macros | |
| #define | MAX_RADIUS 250 |
| #define | ALPHA 0.5 |
Functions | |
| bool | nav_chemotaxis_init (uint8_t c, uint8_t plume) |
| bool | nav_chemotaxis (uint8_t c, uint8_t plume) |
Variables | |
| static uint8_t | last_plume_value |
| static float | radius |
| static int8_t | sign |
| #define ALPHA 0.5 |
Definition at line 11 of file chemotaxis.c.
Referenced by nav_chemotaxis().
| #define MAX_RADIUS 250 |
Definition at line 10 of file chemotaxis.c.
Referenced by nav_chemotaxis(), and nav_chemotaxis_init().
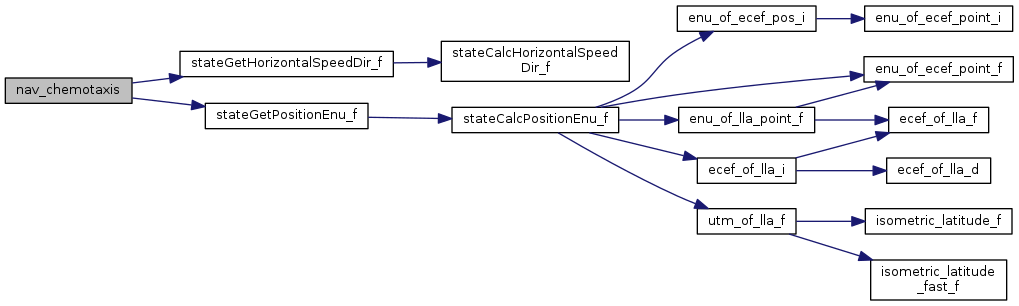
Definition at line 28 of file chemotaxis.c.
References ALPHA, chemo_sensor, DEFAULT_CIRCLE_RADIUS, last_plume_value, MAX_CHEMO, MAX_RADIUS, NavCircleWaypoint, radius, sign, stateGetHorizontalSpeedDir_f(), stateGetPositionEnu_f(), waypoints, point::x, FloatVect2::x, EnuCoor_f::x, point::y, FloatVect2::y, and EnuCoor_f::y.
Here is the call graph for this function:Definition at line 18 of file chemotaxis.c.
References last_plume_value, MAX_RADIUS, radius, sign, waypoints, point::x, and point::y.
|
static |
Definition at line 13 of file chemotaxis.c.
Referenced by nav_chemotaxis(), and nav_chemotaxis_init().
|
static |
Definition at line 15 of file chemotaxis.c.
Referenced by init_jsbsim(), mission_nav_circle(), nav_chemotaxis(), nav_chemotaxis_init(), nav_circle(), nav_circle_XY(), nav_compute_baseleg(), nav_line_border_run(), nav_line_osam_run(), nav_oval(), nav_skid_landing_setup(), nav_survey_disc_run(), snav_init(), and snav_on_time().
|
static |
Definition at line 16 of file chemotaxis.c.
Referenced by nav_chemotaxis(), and nav_chemotaxis_init().
 1.8.8
1.8.8