|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Actuator driver for the bebop and bebop 2. More...
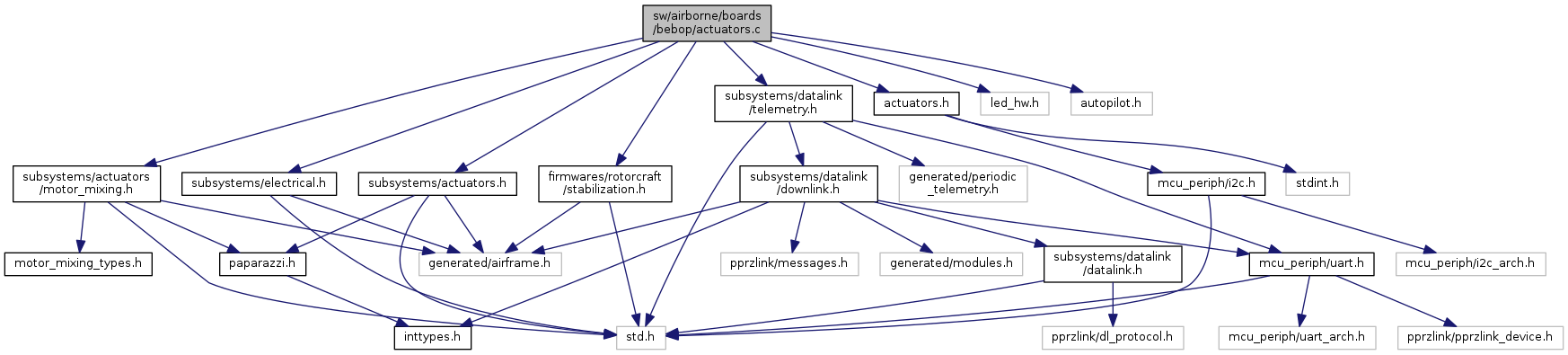
#include "subsystems/actuators.h"#include "subsystems/actuators/motor_mixing.h"#include "subsystems/electrical.h"#include "actuators.h"#include "led_hw.h"#include "autopilot.h"#include "subsystems/datalink/telemetry.h"#include "firmwares/rotorcraft/stabilization.h" Include dependency graph for actuators.c:
Include dependency graph for actuators.c:Go to the source code of this file.
Functions | |
| static void | send_bebop_actuators (struct transport_tx *trans, struct link_device *dev) |
| static uint8_t | actuators_bebop_checksum (uint8_t *bytes, uint8_t size) |
| void | actuators_bebop_init (void) |
| void | actuators_bebop_commit (void) |
Variables | |
| uint32_t | led_hw_values |
| struct ActuatorsBebop | actuators_bebop |
Actuator driver for the bebop and bebop 2.
Definition in file actuators.c.
Definition at line 142 of file actuators.c.
References checksum.
Referenced by actuators_bebop_commit().
Here is the caller graph for this function:| void actuators_bebop_commit | ( | void | ) |
Definition at line 73 of file actuators.c.
References actuators_bebop, actuators_bebop_checksum(), ACTUATORS_BEBOP_CLEAR_ERROR, ACTUATORS_BEBOP_GET_OBS_DATA, ACTUATORS_BEBOP_SET_REF_SPEED, ACTUATORS_BEBOP_START_PROP, ACTUATORS_BEBOP_STOP_PROP, ACTUATORS_BEBOP_TOGGLE_GPIO, autopilot_motors_on, autopilot_set_motors_on(), i2c_transaction::buf, electrical, FALSE, ActuatorsBebop::i2c_trans, i2c_transceive(), i2c_transmit(), ActuatorsBebop::led, led_hw_values, ActuatorsBebop::rpm_obs, ActuatorsBebop::rpm_ref, i2c_transaction::slave_addr, and Electrical::vsupply.
Here is the call graph for this function:| void actuators_bebop_init | ( | void | ) |
Definition at line 61 of file actuators.c.
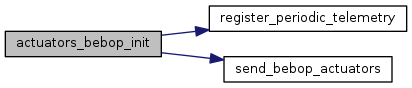
References actuators_bebop, ACTUATORS_BEBOP_ADDR, DefaultPeriodic, ActuatorsBebop::i2c_trans, I2CTransDone, ActuatorsBebop::led, register_periodic_telemetry(), send_bebop_actuators(), i2c_transaction::slave_addr, and i2c_transaction::status.
Here is the call graph for this function:
|
static |
Definition at line 39 of file actuators.c.
References actuators_bebop, ActuatorsBebop::rpm_obs, ActuatorsBebop::rpm_ref, and stabilization_cmd.
Referenced by actuators_bebop_init().
Here is the caller graph for this function:| struct ActuatorsBebop actuators_bebop |
Definition at line 58 of file actuators.c.
Referenced by actuators_bebop_commit(), actuators_bebop_init(), and send_bebop_actuators().
| uint32_t led_hw_values |
Definition at line 57 of file actuators.c.
 1.8.8
1.8.8