|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Actuator driver for ardrone2-raw version. More...
#include <stdint.h> Include dependency graph for actuators.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for actuators.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | ACTUATORS_ARDRONE_NB 4 |
| #define | SERVOS_TICS_OF_USEC(_v) (_v) |
| #define | ActuatorArdroneSet(_i, _v) { actuators_pwm_values[_i] = _v; } |
| #define | ActuatorsArdroneCommit() actuators_ardrone_commit(); |
| #define | ActuatorsArdroneInit() actuators_ardrone_init(); |
| #define | MOT_LEDOFF 0 |
| #define | MOT_LEDRED 1 |
| #define | MOT_LEDGREEN 2 |
| #define | MOT_LEDORANGE 3 |
Functions | |
| void | actuators_ardrone_commit (void) |
| void | actuators_ardrone_init (void) |
| int | actuators_ardrone_cmd (uint8_t cmd, uint8_t *reply, int replylen) |
| void | actuators_ardrone_set_pwm (uint16_t pwm0, uint16_t pwm1, uint16_t pwm2, uint16_t pwm3) |
| Write motor speed command cmd = 001aaaaa aaaabbbb bbbbbccc ccccccdd ddddddd0. More... | |
| void | actuators_ardrone_set_leds (uint8_t led0, uint8_t led1, uint8_t led2, uint8_t led3) |
| Write LED command cmd = 011rrrr0 000gggg0 (this is ardrone1 format, we need ardrone2 format) More... | |
| void | actuators_ardrone_close (void) |
Variables | |
| uint16_t | actuators_pwm_values [ACTUATORS_ARDRONE_NB] |
Actuator driver for ardrone2-raw version.
Definition in file actuators.h.
| #define ActuatorArdroneSet | ( | _i, | |
| _v | |||
| ) | { actuators_pwm_values[_i] = _v; } |
Definition at line 42 of file actuators.h.
| #define ACTUATORS_ARDRONE_NB 4 |
Definition at line 37 of file actuators.h.
| #define ActuatorsArdroneCommit | ( | ) | actuators_ardrone_commit(); |
Definition at line 43 of file actuators.h.
| #define ActuatorsArdroneInit | ( | ) | actuators_ardrone_init(); |
Definition at line 44 of file actuators.h.
| #define MOT_LEDGREEN 2 |
Definition at line 48 of file actuators.h.
Referenced by actuators_ardrone_init().
| #define MOT_LEDOFF 0 |
Definition at line 46 of file actuators.h.
| #define MOT_LEDORANGE 3 |
Definition at line 49 of file actuators.h.
| #define MOT_LEDRED 1 |
Definition at line 47 of file actuators.h.
Referenced by actuators_ardrone_init().
| #define SERVOS_TICS_OF_USEC | ( | _v | ) | (_v) |
Definition at line 40 of file actuators.h.
| void actuators_ardrone_close | ( | void | ) |
Definition at line 271 of file actuators.c.
References actuator_ardrone2_fd.
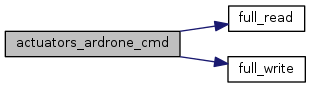
Definition at line 158 of file actuators.c.
References actuator_ardrone2_fd, full_read(), and full_write().
Referenced by actuators_ardrone_init().
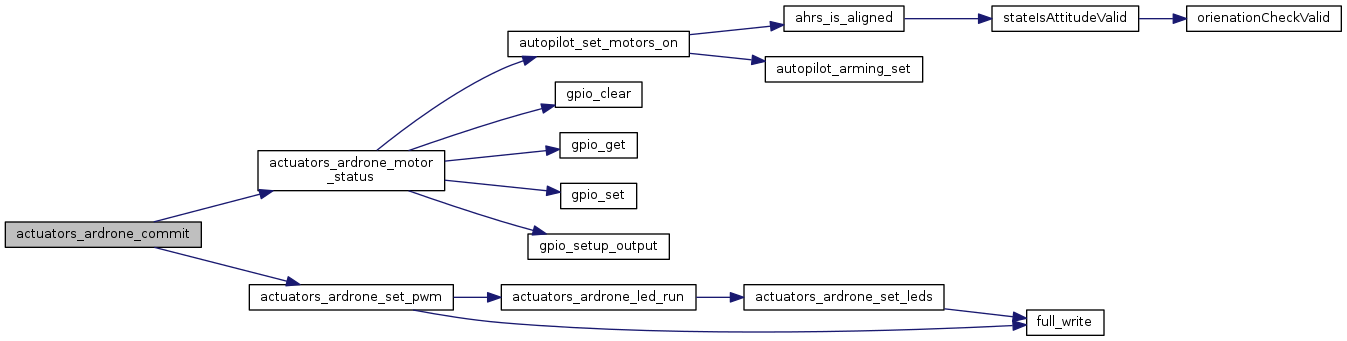
Here is the call graph for this function: Here is the caller graph for this function:| void actuators_ardrone_commit | ( | void | ) |
Definition at line 220 of file actuators.c.
References actuators_ardrone_motor_status(), actuators_ardrone_set_pwm(), and actuators_pwm_values.
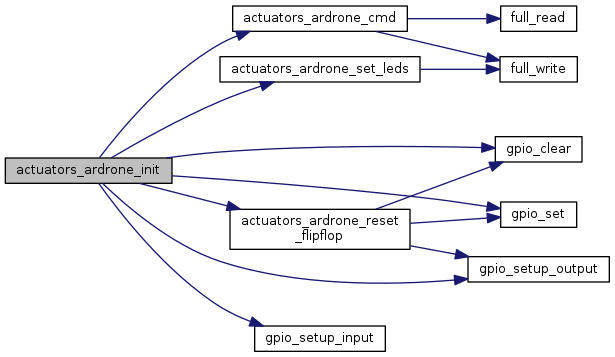
Here is the call graph for this function:| void actuators_ardrone_init | ( | void | ) |
Definition at line 81 of file actuators.c.
References actuator_ardrone2_fd, actuators_ardrone_cmd(), actuators_ardrone_reset_flipflop(), actuators_ardrone_set_leds(), ARDRONE_GPIO_PIN_IRQ_FLIPFLOP, ARDRONE_GPIO_PIN_IRQ_INPUT, ARDRONE_GPIO_PIN_MOTOR1, ARDRONE_GPIO_PIN_MOTOR2, ARDRONE_GPIO_PIN_MOTOR3, ARDRONE_GPIO_PIN_MOTOR4, ARDRONE_GPIO_PORT, B115200, gpio_clear(), gpio_set(), gpio_setup_input(), gpio_setup_output(), led_hw_values, MOT_LEDGREEN, and MOT_LEDRED.
Here is the call graph for this function:Write LED command cmd = 011rrrr0 000gggg0 (this is ardrone1 format, we need ardrone2 format)
led0 = RearLeft led1 = RearRight led2 = FrontRight led3 = FrontLeft
Definition at line 254 of file actuators.c.
References actuator_ardrone2_fd, and full_write().
Referenced by actuators_ardrone_init(), and actuators_ardrone_led_run().
Here is the call graph for this function: Here is the caller graph for this function:Write motor speed command cmd = 001aaaaa aaaabbbb bbbbbccc ccccccdd ddddddd0.
Definition at line 231 of file actuators.c.
References actuator_ardrone2_fd, actuators_ardrone_led_run(), and full_write().
Referenced by actuators_ardrone_commit().
Here is the call graph for this function: Here is the caller graph for this function:| uint16_t actuators_pwm_values[ACTUATORS_ARDRONE_NB] |
Definition at line 51 of file actuators.h.
 1.8.8
1.8.8