|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
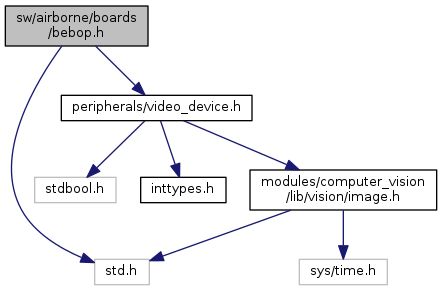
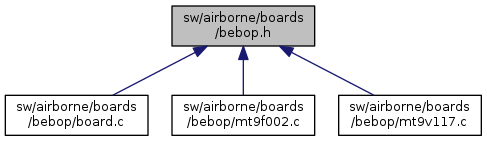
 Include dependency graph for bebop.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for bebop.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | BOARD_BEBOP |
| #define | MT9F002_OUTPUT_HEIGHT 3320 |
| #define | MT9F002_OUTPUT_WIDTH 2048 |
| #define | MT9F002_INITIAL_OFFSET_X 1000 |
| #define | MT9F002_INITIAL_OFFSET_Y 0 |
| #define | MT9F002_OUTPUT_SCALER 1.0 |
| Our output is only OUTPUT_SCALER of the pixels we take of the sensor It is programmable in 1/16 steps determined by ScaleFactor = 16/scale_m. More... | |
| #define | MT9F002_TARGET_EXPOSURE 30 |
| Exposure of the front camera of the bebop. More... | |
| #define | MT9F002_TARGET_FPS 5 |
| #define | UART1_DEV /dev/ttyPA1 |
| uart connected to GPS internally More... | |
| #define | UART2_DEV /dev/ttyUSB0 |
| FTDI cable for stereoboard or external GPS. More... | |
| #define | DEFAULT_ACTUATORS "boards/bebop/actuators.h" |
| #define | ActuatorDefaultSet(_x, _y) ActuatorsBebopSet(_x,_y) |
| #define | ActuatorsDefaultInit() ActuatorsBebopInit() |
| #define | ActuatorsDefaultCommit() ActuatorsBebopCommit() |
| #define | USE_BARO_BOARD 1 |
| #define | SPI0_MODE 0 |
| #define | SPI0_BITS_PER_WORD 8 |
| #define | SPI0_MAX_SPEED_HZ 320000 |
Variables | |
| struct video_config_t | bottom_camera |
| struct video_config_t | front_camera |
| #define ActuatorDefaultSet | ( | _x, | |
| _y | |||
| ) | ActuatorsBebopSet(_x,_y) |
| #define ActuatorsDefaultCommit | ( | ) | ActuatorsBebopCommit() |
| #define ActuatorsDefaultInit | ( | ) | ActuatorsBebopInit() |
| #define MT9F002_INITIAL_OFFSET_X 1000 |
Definition at line 40 of file bebop.h.
Referenced by board_init2().
| #define MT9F002_INITIAL_OFFSET_Y 0 |
Definition at line 44 of file bebop.h.
Referenced by board_init2().
| #define MT9F002_OUTPUT_HEIGHT 3320 |
Definition at line 32 of file bebop.h.
Referenced by board_init2().
| #define MT9F002_OUTPUT_SCALER 1.0 |
Our output is only OUTPUT_SCALER of the pixels we take of the sensor It is programmable in 1/16 steps determined by ScaleFactor = 16/scale_m.
Legal values for scale_m are 16 through 128, giving you the ability to scale from 1:1 to 1:8 (with m=128). Example: output_width = 512 output_height = 830 output_scaler = 0.25 We now get an image of 512 by 830 which contains a "compressed version" of what would normally be an image of 2048 by 3320. Be warned: set your offset x appropriately. Example of what could go wrong: output_width = 512 output_height = 830 output_scaler = 0.25 offset_x = 1500 We now ask for pixels outside the 4608H x 2592V sensor or the 3320H x 2048W of the ISP.
Definition at line 66 of file bebop.h.
Referenced by board_init2().
| #define MT9F002_OUTPUT_WIDTH 2048 |
Definition at line 36 of file bebop.h.
Referenced by board_init2().
| #define MT9F002_TARGET_EXPOSURE 30 |
Exposure of the front camera of the bebop.
Experimental values: Outside: 15 Inside well lit: 30 Inside poorly lit: 60
Definition at line 75 of file bebop.h.
Referenced by board_init2().
| #define MT9F002_TARGET_FPS 5 |
Definition at line 79 of file bebop.h.
Referenced by board_init2().
| #define UART1_DEV /dev/ttyPA1 |
| #define UART2_DEV /dev/ttyUSB0 |
| struct video_config_t bottom_camera |
| struct video_config_t front_camera |
 1.8.8
1.8.8