|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
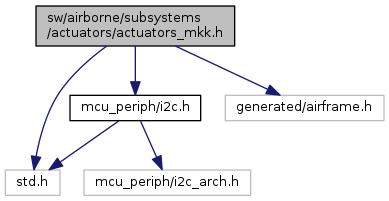
Actuators driver for Mikrokopter motor controllers. More...
 Include dependency graph for actuators_mkk.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for actuators_mkk.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | ActuatorsMkk |
Macros | |
| #define | ActuatorMkkSet(_i, _v) { actuators_mkk.trans[_i].buf[0] = _v; } |
| #define | ActuatorsMkkInit() actuators_mkk_init() |
| #define | ActuatorsMkkCommit() actuators_mkk_set() |
Functions | |
| void | actuators_mkk_init (void) |
| void | actuators_mkk_set (void) |
Variables | |
| struct ActuatorsMkk | actuators_mkk |
Actuators driver for Mikrokopter motor controllers.
Definition in file actuators_mkk.h.
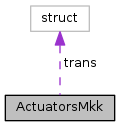
| struct ActuatorsMkk |
Definition at line 35 of file actuators_mkk.h.
Collaboration diagram for ActuatorsMkk:| Data Fields | ||
|---|---|---|
| uint16_t | submit_err_cnt | |
| struct i2c_transaction | trans[ACTUATORS_MKK_NB] | |
| #define ActuatorMkkSet | ( | _i, | |
| _v | |||
| ) | { actuators_mkk.trans[_i].buf[0] = _v; } |
Definition at line 45 of file actuators_mkk.h.
| #define ActuatorsMkkCommit | ( | ) | actuators_mkk_set() |
Definition at line 47 of file actuators_mkk.h.
| #define ActuatorsMkkInit | ( | ) | actuators_mkk_init() |
Definition at line 46 of file actuators_mkk.h.
| void actuators_mkk_init | ( | void | ) |
Definition at line 37 of file actuators_mkk.c.
References ActuatorsMkk::submit_err_cnt.
| void actuators_mkk_set | ( | void | ) |
Definition at line 43 of file actuators_mkk.c.
References actuators_mkk, i2c_transaction::buf, i2c_transmit(), ActuatorsMkk::submit_err_cnt, SysTimeTimer, ActuatorsMkk::trans, and USEC_OF_SEC.
Here is the call graph for this function:| struct ActuatorsMkk actuators_mkk |
Definition at line 34 of file actuators_mkk.c.
Referenced by actuators_mkk_set().
 1.8.8
1.8.8