|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
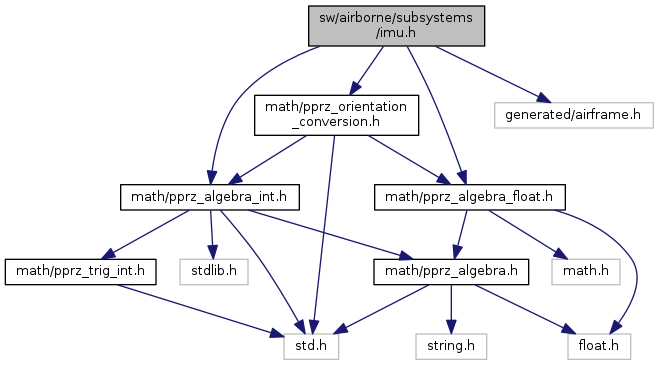
Inertial Measurement Unit interface. More...
#include "math/pprz_algebra_int.h"#include "math/pprz_algebra_float.h"#include "math/pprz_orientation_conversion.h"#include "generated/airframe.h" Include dependency graph for imu.h:
Include dependency graph for imu.h:Go to the source code of this file.
Data Structures | |
| struct | Imu |
| abstract IMU interface providing fixed point interface More... | |
Macros | |
| #define | IMU_BODY_TO_IMU_PHI 0 |
| #define | IMU_BODY_TO_IMU_THETA 0 |
| #define | IMU_BODY_TO_IMU_PSI 0 |
| #define | IMU_GYRO_P_NEUTRAL 0 |
| #define | IMU_GYRO_Q_NEUTRAL 0 |
| #define | IMU_GYRO_R_NEUTRAL 0 |
| #define | IMU_ACCEL_X_NEUTRAL 0 |
| #define | IMU_ACCEL_Y_NEUTRAL 0 |
| #define | IMU_ACCEL_Z_NEUTRAL 0 |
| #define | IMU_GYRO_P_SIGN 1 |
| #define | IMU_GYRO_Q_SIGN 1 |
| #define | IMU_GYRO_R_SIGN 1 |
| #define | IMU_ACCEL_X_SIGN 1 |
| #define | IMU_ACCEL_Y_SIGN 1 |
| #define | IMU_ACCEL_Z_SIGN 1 |
| #define | IMU_MAG_X_SIGN 1 |
| #define | IMU_MAG_Y_SIGN 1 |
| #define | IMU_MAG_Z_SIGN 1 |
Functions | |
| void | imu_impl_init (void) |
| must be defined by underlying hardware More... | |
| void | imu_periodic (void) |
| optional. More... | |
| void | imu_init (void) |
| void | imu_SetBodyToImuPhi (float phi) |
| void | imu_SetBodyToImuTheta (float theta) |
| void | imu_SetBodyToImuPsi (float psi) |
| void | imu_SetBodyToImuCurrent (float set) |
| void | imu_ResetBodyToImu (float reset) |
| void | imu_scale_gyro (struct Imu *_imu) |
| void | imu_scale_accel (struct Imu *_imu) |
| void | imu_scale_mag (struct Imu *_imu) |
Variables | |
| struct Imu | imu |
| global IMU state More... | |
Inertial Measurement Unit interface.
Definition in file imu.h.
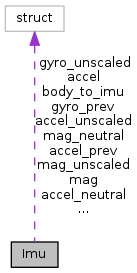
| struct Imu |
Collaboration diagram for Imu:| Data Fields | ||
|---|---|---|
| struct Int32Vect3 | accel | accelerometer measurements in m/s^2 in BFP with INT32_ACCEL_FRAC |
| struct Int32Vect3 | accel_neutral | accelerometer bias |
| struct Int32Vect3 | accel_prev | previous accelerometer measurements |
| struct Int32Vect3 | accel_unscaled | unscaled accelerometer measurements |
| bool_t | b2i_set_current |
flag for adjusting body_to_imu via settings. if FALSE, reset to airframe values, if TRUE set current roll/pitch |
| struct OrientationReps | body_to_imu | rotation from body to imu frame |
| struct Int32Rates | gyro | gyroscope measurements in rad/s in BFP with INT32_RATE_FRAC |
| struct Int32Rates | gyro_neutral | gyroscope bias |
| struct Int32Rates | gyro_prev | previous gyroscope measurements |
| struct Int32Rates | gyro_unscaled | unscaled gyroscope measurements |
| struct Int32Vect3 | mag | magnetometer measurements scaled to 1 in BFP with INT32_MAG_FRAC |
| struct Int32Vect3 | mag_neutral | magnetometer neutral readings (bias) |
| struct Int32Vect3 | mag_unscaled | unscaled magnetometer measurements |
| #define IMU_BODY_TO_IMU_PHI 0 |
Definition at line 82 of file imu.h.
Referenced by imu_init(), and imu_SetBodyToImuCurrent().
| #define IMU_BODY_TO_IMU_PSI 0 |
Definition at line 84 of file imu.h.
Referenced by imu_init(), and imu_SetBodyToImuCurrent().
| #define IMU_BODY_TO_IMU_THETA 0 |
Definition at line 83 of file imu.h.
Referenced by imu_init(), and imu_SetBodyToImuCurrent().
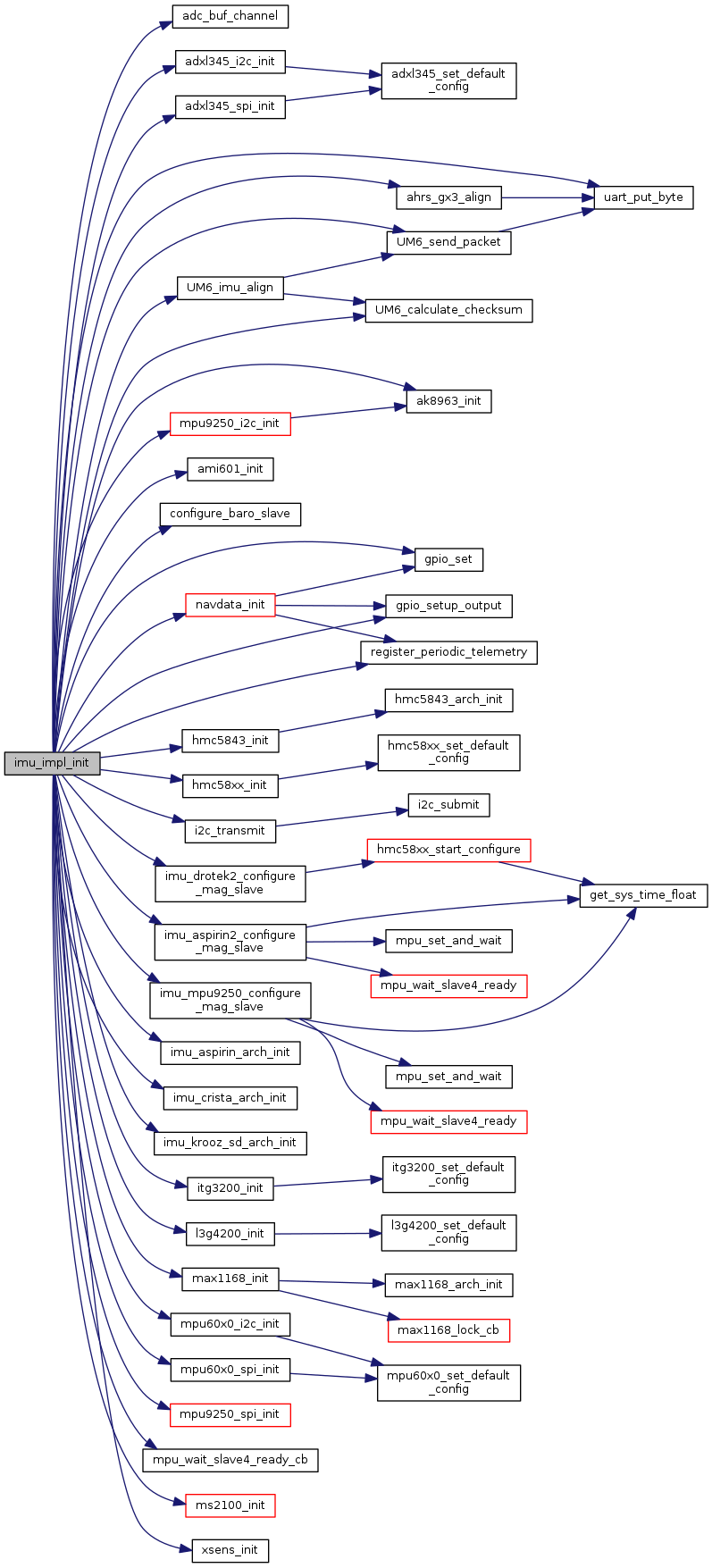
| void imu_impl_init | ( | void | ) |
must be defined by underlying hardware
must be defined by underlying hardware
Definition at line 79 of file imu_apogee.c.
References ImuAspirin::acc_adxl, ImuAspirinI2c::acc_adxl, ImuGL1I2c::acc_adxl, ImuPpzuav::acc_adxl, ImuXsens::accel_available, ImuNps::accel_available, Mpu60x0Config::accel_range, Mpu9250Config::accel_range, ImuKrooz::accel_sum, ImuAspirin::accel_valid, ImuKrooz::ad7689_spi_rx_buffer, ImuKrooz::ad7689_spi_tx_buffer, ImuKrooz::ad7689_trans, adc_buf_channel(), ADS8344_available, ImuNavgo::adxl, ImuUmarim::adxl, ADXL345_ADDR, ADXL345_ADDR_ALT, adxl345_i2c_init(), adxl345_spi_init(), spi_transaction::after_cb, ahrs_gx3, ahrs_gx3_align(), ImuBebop::ak, AK8963_ADDR, ak8963_init(), ami601_init(), analog_imu_adc_buf, APOGEE_ACCEL_RANGE, APOGEE_GYRO_RANGE, APOGEE_LOWPASS_FILTER, APOGEE_SMPLRT_DIV, aspirin2_mpu60x0, ASPIRIN_2_ACCEL_RANGE, ASPIRIN_2_GYRO_RANGE, ASPIRIN_2_SPI_DEV, ASPIRIN_2_SPI_SLAVE_IDX, ASPIRIN_ACCEL_RATE, ASPIRIN_GYRO_LOWPASS, ASPIRIN_GYRO_SMPLRT_DIV, ASPIRIN_I2C_DEV, ASPIRIN_SPI_DEV, ASPIRIN_SPI_SLAVE_IDX, BEBOP_ACCEL_RANGE, BEBOP_GYRO_RANGE, BEBOP_MAG_I2C_DEV, BEBOP_MPU_I2C_DEV, spi_transaction::before_cb, spi_transaction::bitorder, i2c_transaction::buf, buf_out, spi_transaction::cdiv, GX3Packet::chksm_error, UM6Packet::chksm_error, Adxl345_I2c::config, Adxl345_Spi::config, Mpu60x0_Spi::config, Mpu60x0_I2c::config, Mpu9250_I2c::config, L3g4200::config, Itg3200::config, Mpu60x0I2cSlave::configure, Mpu9250I2cSlave::configure, configure_baro_slave(), spi_transaction::cpha, spi_transaction::cpol, L3g4200Config::ctrl_reg1, L3g4200Config::ctrl_reg4, L3g4200Config::ctrl_reg5, data_chk, DefaultPeriodic, Mpu9250Config::dlpf_accel_cfg, Itg3200Config::dlpf_cfg, Mpu60x0Config::dlpf_cfg, Mpu9250Config::dlpf_gyro_cfg, Mpu60x0Config::drdy_int_enable, DROTEK_2_ACCEL_RANGE, DROTEK_2_GYRO_RANGE, DROTEK_2_HMC_I2C_ADDR, DROTEK_2_MPU_I2C_ADDR, spi_transaction::dss, FALSE, GL1_ACCEL_RATE, GL1_GYRO_LOWPASS, GL1_GYRO_SMPLRT, gpio_set(), gpio_setup_output(), GX3PacketWaiting, ImuXsens::gyro_available, ImuNps::gyro_available, ImuAspirin::gyro_itg, ImuAspirinI2c::gyro_itg, ImuPpzuav::gyro_itg, ImuGL1I2c::gyro_l3g, Mpu60x0Config::gyro_range, Mpu9250Config::gyro_range, ImuAspirin::gyro_valid, GX3Packet::hdr_error, UM6Packet::hdr_error, ImuPx4fmu::hmc, ImuMpu6000Hmc5883::hmc, ImuHbmini::hmc, ImuNavgo::hmc, ImuNavstik::hmc, ImuDrotek2::hmc, ImuKrooz::hmc, hmc5843_init(), HMC58XX_ADDR, hmc58xx_init(), ImuKrooz::hmc_eoc, HMC_TYPE_5843, HMC_TYPE_5883, Mpu60x0Config::i2c_bypass, Mpu60x0Config::i2c_mst_clk, Mpu9250Config::i2c_mst_clk, Mpu60x0Config::i2c_mst_delay, Mpu9250Config::i2c_mst_delay, i2c_transmit(), I2CTransPending, imu_apogee, imu_aspirin2, imu_aspirin2_configure_mag_slave(), imu_aspirin_arch_init(), imu_b2, imu_crista_arch_init(), imu_drotek2_configure_mag_slave(), IMU_GX3_LONG_DELAY, imu_hbmini, imu_krooz_sd_arch_init(), IMU_MPU60X0_ACCEL_RANGE, IMU_MPU60X0_GYRO_RANGE, IMU_MPU60X0_I2C_ADDR, imu_mpu9250, IMU_MPU9250_ACCEL_LOWPASS_FILTER, IMU_MPU9250_ACCEL_RANGE, imu_mpu9250_configure_mag_slave(), IMU_MPU9250_GYRO_LOWPASS_FILTER, IMU_MPU9250_GYRO_RANGE, IMU_MPU9250_I2C_ADDR, IMU_MPU9250_SMPLRT_DIV, IMU_MPU_ACCEL_RANGE, IMU_MPU_GYRO_RANGE, imu_mpu_i2c, imu_navgo, imu_nps, imu_overrun, IMU_PPZUAV_ACCEL_RATE, IMU_PPZUAV_GYRO_LOWPASS, IMU_PPZUAV_GYRO_SMPLRT_DIV, IMU_PPZUAV_I2C_DEV, IMU_UM6_COMMUNICATION_REG, IMU_UM6_MISC_CONFIG_REG, imu_xsens, InitMedianFilterRatesInt, InitMedianFilterVect3Int, spi_transaction::input_buf, spi_transaction::input_length, AhrsGX3::is_aligned, ImuNavgo::itg, ImuUmarim::itg, ITG3200_ADDR, ITG3200_ADDR_ALT, itg3200_init(), KROOZ_ACCEL_RANGE, KROOZ_GYRO_RANGE, KROOZ_LOWPASS_FILTER, KROOZ_SMPLRT_DIV, L3G4200_ADDR_ALT, l3g4200_init(), L3G4200_SCALE, ImuXsens::mag_available, ImuNps::mag_available, ImuAspirin::mag_hmc, ImuAspirinI2c::mag_hmc, ImuGL1I2c::mag_hmc, ImuPpzuav::mag_hmc, ImuAspirin::mag_valid, max1168_init(), ImuKrooz::meas_nb, median_mag, ImuMpu60x0::mpu, ImuMpu6000::mpu, ImuPx4fmu::mpu, ImuMpu6000Hmc5883::mpu, ImuAspirin2Spi::mpu, ImuBebop::mpu, ImuNavstik::mpu, ImuMpu9250::mpu, ImuDrotek2::mpu, ImuKrooz::mpu, ImuApogee::mpu, MPU60X0_ADDR, MPU60X0_ADDR_ALT, mpu60x0_i2c_init(), MPU60X0_MST_CLK_400KHZ, MPU60X0_REG_ACCEL_CONFIG, MPU60X0_REG_CONFIG, MPU60X0_REG_GYRO_CONFIG, MPU60X0_REG_PWR_MGMT_1, MPU60X0_REG_SMPLRT_DIV, mpu60x0_spi_init(), mpu9250_i2c_init(), MPU9250_MST_CLK_400KHZ, mpu9250_spi_init(), ImuKrooz::mpu_eoc, mpu_wait_slave4_ready_cb(), ms2100, ms2100_init(), GX3Packet::msg_available, UM6Packet::msg_available, GX3Packet::msg_idx, UM6Packet::msg_idx, navdata_init(), NAVGO_ACCEL_RATE, NAVGO_GYRO_LOWPASS, NAVGO_GYRO_SMPLRT_DIV, NAVSTIK_ACCEL_RANGE, NAVSTIK_GYRO_RANGE, NAVSTIK_MAG_I2C_DEV, NAVSTIK_MPU_I2C_DEV, Mpu60x0Config::nb_bytes, Mpu9250Config::nb_bytes, Mpu60x0Config::nb_slaves, Mpu9250Config::nb_slaves, spi_transaction::output_buf, spi_transaction::output_length, AhrsGX3::packet, PX4FMU_ACCEL_RANGE, PX4FMU_GYRO_RANGE, Adxl345Config::range, Adxl345Config::rate, RATES_ASSIGN, ImuKrooz::rates_sum, register_periodic_telemetry(), spi_transaction::select, ImuAspirin2Spi::slave4_ready, ImuMpu9250::slave4_ready, spi_transaction::slave_idx, Mpu60x0Config::slaves, Mpu9250Config::slaves, Itg3200Config::smplrt_div, Mpu60x0Config::smplrt_div, Mpu9250Config::smplrt_div, spi1, SPI_SLAVE2, SPICphaEdge1, SPICphaEdge2, SPICpolIdleHigh, SPICpolIdleLow, SPIDiv16, SPIDiv64, SPIDss8bit, SPIMSBFirst, SPISelectUnselect, SPITransDone, GX3Packet::status, UM6Packet::status, i2c_transaction::status, spi_transaction::status, TRUE, Hmc58xx::type, uart_put_byte(), UM6_calculate_checksum(), UM6_imu_align(), UM6_packet, UM6_send_packet(), UM6_status, UM6PacketWaiting, UM6Uninit, UMARIM_ACCEL_RANGE, UMARIM_ACCEL_RATE, UMARIM_GYRO_LOWPASS, UMARIM_GYRO_SMPLRT_DIV, VECT3_ASSIGN, ImuAspirin2Spi::wait_slave4_rx_buf, ImuMpu9250::wait_slave4_rx_buf, ImuAspirin2Spi::wait_slave4_trans, ImuMpu9250::wait_slave4_trans, ImuAspirin2Spi::wait_slave4_tx_buf, ImuMpu9250::wait_slave4_tx_buf, and xsens_init().
Referenced by imu_init().
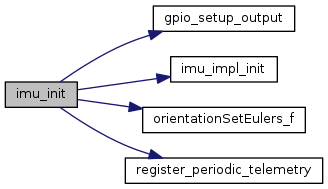
Here is the call graph for this function: Here is the caller graph for this function:| void imu_init | ( | void | ) |
Definition at line 110 of file imu.c.
References Imu::accel_neutral, Imu::body_to_imu, DefaultPeriodic, gpio_setup_output(), Imu::gyro_neutral, imu, IMU_ACCEL_X_NEUTRAL, IMU_ACCEL_Y_NEUTRAL, IMU_ACCEL_Z_NEUTRAL, IMU_BODY_TO_IMU_PHI, IMU_BODY_TO_IMU_PSI, IMU_BODY_TO_IMU_THETA, IMU_GYRO_P_NEUTRAL, IMU_GYRO_Q_NEUTRAL, IMU_GYRO_R_NEUTRAL, imu_impl_init(), IMU_POWER_GPIO, INT_VECT3_ZERO, Imu::mag_neutral, orientationSetEulers_f(), RATES_ASSIGN, register_periodic_telemetry(), and VECT3_ASSIGN.
Referenced by init_ap(), and main_init().
Here is the call graph for this function: Here is the caller graph for this function:| void imu_periodic | ( | void | ) |
optional.
If not provided by implementation, empty function is used
optional.
Read the MPU60x0 every periodic call and the HMC58XX every 10th call.
Definition at line 95 of file imu_apogee.c.
References ImuAspirin::acc_adxl, ImuAspirinI2c::acc_adxl, ImuGL1I2c::acc_adxl, ImuPpzuav::acc_adxl, Imu::accel, ImuKrooz::accel_filtered, ImuKrooz::accel_sum, Imu::accel_unscaled, ImuNavgo::adxl, ImuUmarim::adxl, adxl345_i2c_periodic(), adxl345_spi_periodic(), ImuBebop::ak, ak8963_periodic(), ami601_read(), analog_imu_adc_buf, aspirin2_mpu60x0, i2c_transaction::buf, Mpu60x0_I2c::config, get_sys_time_usec(), Imu::gyro, ImuAspirin::gyro_itg, ImuAspirinI2c::gyro_itg, ImuPpzuav::gyro_itg, ImuGL1I2c::gyro_l3g, Imu::gyro_unscaled, adc_buf::head, ImuPx4fmu::hmc, ImuMpu6000Hmc5883::hmc, ImuHbmini::hmc, ImuNavgo::hmc, ImuNavstik::hmc, ImuDrotek2::hmc, ImuKrooz::hmc, hmc5843_periodic(), hmc58xx_periodic(), hmc58xx_read(), hmc58xx_start_configure(), i2c_transceive(), imu, IMU_ANALOG_ID, imu_apogee, imu_aspirin, imu_aspirin2, imu_b2, imu_bebop, IMU_BOARD_ID, imu_drotek2, imu_gl1, imu_hbmini, IMU_KROOZ_ACCEL_AVG_FILTER, imu_mpu9250, imu_mpu_hmc, imu_mpu_i2c, imu_mpu_spi, imu_navgo, imu_navstik, imu_overrun, imu_ppzuav, imu_px4fmu, imu_scale_accel(), imu_scale_gyro(), imu_umarim, ImuCristaArchPeriodic, Hmc58xx::initialized, Mpu60x0Config::initialized, INT_VECT3_ZERO, ImuNavgo::itg, ImuUmarim::itg, itg3200_periodic(), l3g4200_periodic(), ImuAspirin::mag_hmc, ImuGL1I2c::mag_hmc, ImuAspirinI2c::mag_hmc, ImuPpzuav::mag_hmc, Max1168Periodic, ImuKrooz::meas_nb, ImuKrooz::meas_nb_acc, ImuMpu6000::mpu, ImuMpu60x0::mpu, ImuPx4fmu::mpu, ImuMpu6000Hmc5883::mpu, ImuAspirin2Spi::mpu, ImuBebop::mpu, ImuNavstik::mpu, ImuMpu9250::mpu, ImuDrotek2::mpu, ImuKrooz::mpu, ImuApogee::mpu, MPU60X0_ADDR, mpu60x0_i2c_periodic(), mpu60x0_i2c_start_configure(), MPU60X0_REG_INT_STATUS, mpu60x0_spi_periodic(), mpu9250_i2c_periodic(), mpu9250_spi_periodic(), ms2100, ms2100_periodic(), NAVGO_ACCEL_RATE, Int32Rates::p, PERIODIC_FREQUENCY, Int32Rates::q, Int32Rates::r, RATES_ASSIGN, ImuKrooz::rates_sum, adc_buf::sum, UpdateMedianFilterVect3Int, VECT3_ADD, VECT3_ASSIGN, VECT3_COPY, VECT3_SDIV, VECT3_SMUL, Uint8Vect3::x, Int32Vect3::x, xsens_periodic(), Uint8Vect3::y, Int32Vect3::y, Uint8Vect3::z, and Int32Vect3::z.
Referenced by main_periodic(), main_periodic_task(), and sensors_task().
Here is the call graph for this function: Here is the caller graph for this function:| void imu_ResetBodyToImu | ( | float | reset | ) |
| void imu_scale_accel | ( | struct Imu * | _imu | ) |
Definition at line 350 of file ahrs_gx3.c.
References Imu::accel, Imu::accel_neutral, Imu::accel_prev, Imu::accel_unscaled, IMU_ACCEL_X_SENS_DEN, IMU_ACCEL_X_SENS_NUM, IMU_ACCEL_X_SIGN, IMU_ACCEL_Y_SENS_DEN, IMU_ACCEL_Y_SENS_NUM, IMU_ACCEL_Y_SIGN, IMU_ACCEL_Z_SENS_DEN, IMU_ACCEL_Z_SENS_NUM, IMU_ACCEL_Z_SIGN, VECT3_COPY, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by aspirin2_subsystem_event(), handle_ins_msg(), imu_apogee_event(), imu_aspirin2_event(), imu_aspirin_event(), imu_aspirin_i2c_event(), imu_b2_event(), imu_bebop_event(), imu_christa_event(), imu_drotek2_event(), imu_gl1_i2c_event(), imu_hbmini_event(), imu_mpu9250_event(), imu_mpu_hmc_event(), imu_mpu_i2c_event(), imu_mpu_spi_event(), imu_navgo_event(), imu_navstik_event(), imu_nps_event(), imu_periodic(), imu_ppzuav_event(), imu_px4fmu_event(), imu_umarim_event(), and navdata_publish_imu().
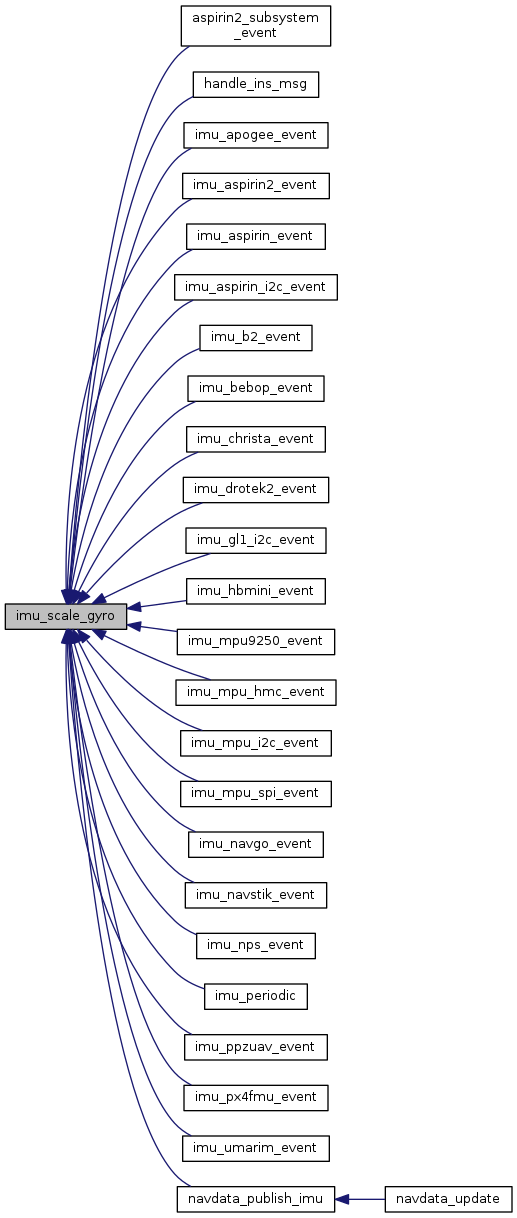
Here is the caller graph for this function:| void imu_scale_gyro | ( | struct Imu * | _imu | ) |
Definition at line 349 of file ahrs_gx3.c.
References Imu::gyro, Imu::gyro_neutral, Imu::gyro_prev, Imu::gyro_unscaled, IMU_GYRO_P_SENS_DEN, IMU_GYRO_P_SENS_NUM, IMU_GYRO_P_SIGN, IMU_GYRO_Q_SENS_DEN, IMU_GYRO_Q_SENS_NUM, IMU_GYRO_Q_SIGN, IMU_GYRO_R_SENS_DEN, IMU_GYRO_R_SENS_NUM, IMU_GYRO_R_SIGN, Int32Rates::p, Int32Rates::q, Int32Rates::r, and RATES_COPY.
Referenced by aspirin2_subsystem_event(), handle_ins_msg(), imu_apogee_event(), imu_aspirin2_event(), imu_aspirin_event(), imu_aspirin_i2c_event(), imu_b2_event(), imu_bebop_event(), imu_christa_event(), imu_drotek2_event(), imu_gl1_i2c_event(), imu_hbmini_event(), imu_mpu9250_event(), imu_mpu_hmc_event(), imu_mpu_i2c_event(), imu_mpu_spi_event(), imu_navgo_event(), imu_navstik_event(), imu_nps_event(), imu_periodic(), imu_ppzuav_event(), imu_px4fmu_event(), imu_umarim_event(), and navdata_publish_imu().
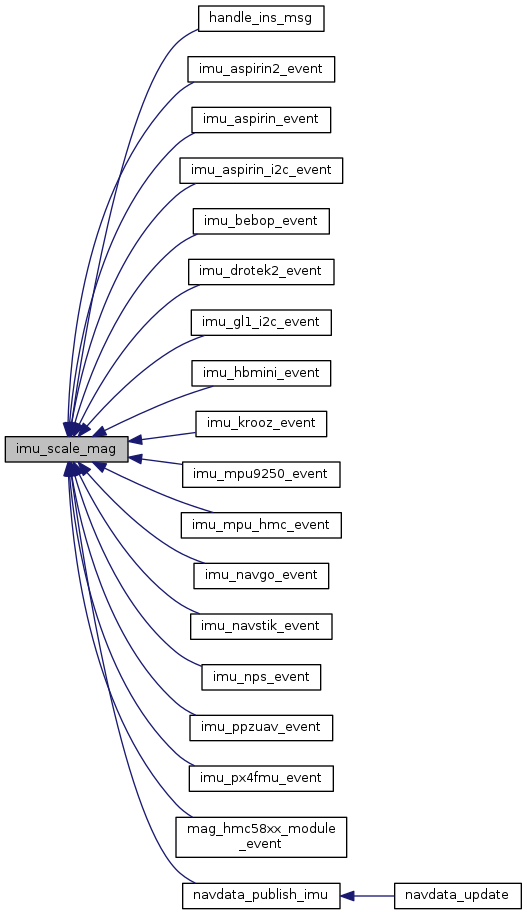
Here is the caller graph for this function:| void imu_scale_mag | ( | struct Imu * | _imu | ) |
Definition at line 351 of file ahrs_gx3.c.
References IMU_MAG_X_SENS_DEN, IMU_MAG_X_SENS_NUM, IMU_MAG_X_SIGN, IMU_MAG_Y_SENS_DEN, IMU_MAG_Y_SENS_NUM, IMU_MAG_Y_SIGN, IMU_MAG_Z_SENS_DEN, IMU_MAG_Z_SENS_NUM, IMU_MAG_Z_SIGN, Imu::mag, Imu::mag_neutral, Imu::mag_unscaled, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by handle_ins_msg(), imu_aspirin2_event(), imu_aspirin_event(), imu_aspirin_i2c_event(), imu_bebop_event(), imu_drotek2_event(), imu_gl1_i2c_event(), imu_hbmini_event(), imu_krooz_event(), imu_mpu9250_event(), imu_mpu_hmc_event(), imu_navgo_event(), imu_navstik_event(), imu_nps_event(), imu_ppzuav_event(), imu_px4fmu_event(), mag_hmc58xx_module_event(), and navdata_publish_imu().
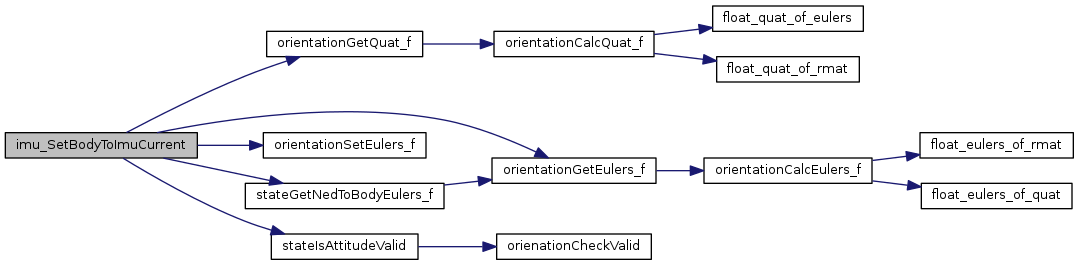
Here is the caller graph for this function:| void imu_SetBodyToImuCurrent | ( | float | set | ) |
Definition at line 179 of file imu.c.
References Imu::b2i_set_current, Imu::body_to_imu, FALSE, imu, IMU_BODY_TO_IMU_PHI, IMU_BODY_TO_IMU_PSI, IMU_BODY_TO_IMU_THETA, orientationGetEulers_f(), orientationGetQuat_f(), orientationSetEulers_f(), FloatEulers::phi, stateGetNedToBodyEulers_f(), stateIsAttitudeValid(), and FloatEulers::theta.
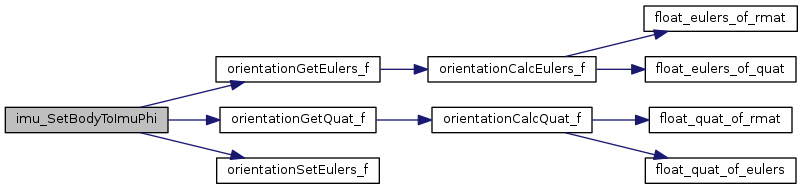
Here is the call graph for this function:| void imu_SetBodyToImuPhi | ( | float | phi | ) |
Definition at line 152 of file imu.c.
References Imu::body_to_imu, imu, orientationGetEulers_f(), orientationGetQuat_f(), orientationSetEulers_f(), and FloatEulers::phi.
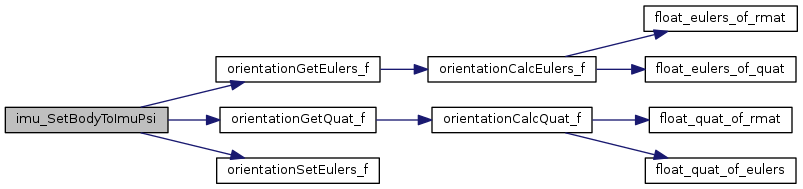
Here is the call graph for this function:| void imu_SetBodyToImuPsi | ( | float | psi | ) |
Definition at line 170 of file imu.c.
References Imu::body_to_imu, imu, orientationGetEulers_f(), orientationGetQuat_f(), orientationSetEulers_f(), and FloatEulers::psi.
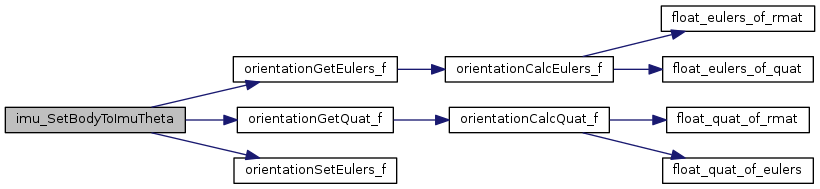
Here is the call graph for this function:| void imu_SetBodyToImuTheta | ( | float | theta | ) |
Definition at line 161 of file imu.c.
References Imu::body_to_imu, imu, orientationGetEulers_f(), orientationGetQuat_f(), orientationSetEulers_f(), and FloatEulers::theta.
Here is the call graph for this function:| struct Imu imu |
global IMU state
Definition at line 43 of file imu_aspirin2.c.
Referenced by ahrs_aligner_run(), ahrs_gx3_init(), ahrs_gx3_publish_imu(), aspirin2_subsystem_downlink_raw(), aspirin2_subsystem_event(), b2_hff_propagate(), direct_memory_logger_periodic(), file_logger_periodic(), gx3_packet_read_message(), handle_ins_msg(), high_speed_logger_spi_link_periodic(), imu_apogee_downlink_raw(), imu_apogee_event(), imu_aspirin2_event(), imu_aspirin_event(), imu_aspirin_i2c_event(), imu_b2_event(), imu_bebop_event(), imu_christa_event(), imu_drotek2_event(), imu_feed_gyro_accel(), imu_feed_mag(), imu_gl1_i2c_event(), imu_hbmini_downlink_raw(), imu_hbmini_event(), imu_init(), imu_krooz_downlink_raw(), imu_krooz_event(), imu_mpu9250_event(), imu_mpu_hmc_event(), imu_mpu_i2c_event(), imu_mpu_spi_event(), imu_navgo_downlink_raw(), imu_navgo_event(), imu_navstik_event(), imu_nps_event(), imu_periodic(), imu_ppzuav_event(), imu_px4fmu_event(), imu_quality_assessment_periodic(), imu_SetBodyToImuCurrent(), imu_SetBodyToImuPhi(), imu_SetBodyToImuPsi(), imu_SetBodyToImuTheta(), imu_um6_publish(), imu_umarim_downlink_raw(), imu_umarim_event(), init_ap(), ins_int_propagate(), logger_uart_periodic(), mag_hmc58xx_module_event(), main_init(), nav_catapult_highrate_module(), navdata_publish_imu(), send_imu_mag_current(), and UM6_packet_read_message().
 1.8.8
1.8.8