|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
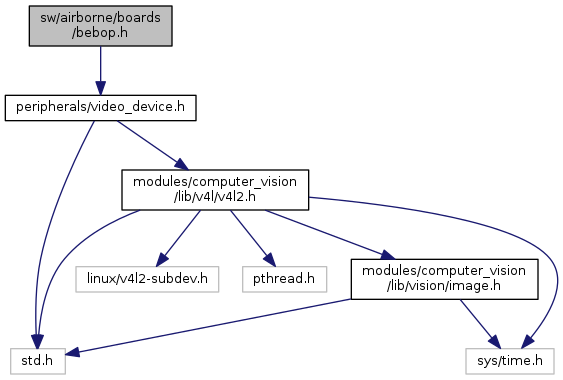
#include "peripherals/video_device.h" Include dependency graph for bebop.h: This graph shows which files directly or indirectly include this file:
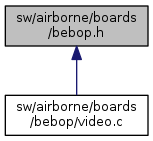
Include dependency graph for bebop.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | BOARD_BEBOP |
| #define | UART1_DEV /dev/ttyPA1 |
| uart connected to GPS internally More... | |
| #define | DEFAULT_ACTUATORS "boards/bebop/actuators.h" |
| #define | ActuatorDefaultSet(_x, _y) ActuatorsBebopSet(_x,_y) |
| #define | ActuatorsDefaultInit() ActuatorsBebopInit() |
| #define | ActuatorsDefaultCommit() ActuatorsBebopCommit() |
| #define | USE_BARO_BOARD 1 |
| #define | SPI0_MODE 0 |
| #define | SPI0_BITS_PER_WORD 8 |
| #define | SPI0_MAX_SPEED_HZ 320000 |
Variables | |
| struct video_config_t | bottom_camera |
| struct video_config_t | front_camera |
| #define ActuatorDefaultSet | ( | _x, | |
| _y | |||
| ) | ActuatorsBebopSet(_x,_y) |
| #define ActuatorsDefaultCommit | ( | ) | ActuatorsBebopCommit() |
| #define ActuatorsDefaultInit | ( | ) | ActuatorsBebopInit() |
| #define UART1_DEV /dev/ttyPA1 |
| struct video_config_t bottom_camera |
| struct video_config_t front_camera |
 1.8.8
1.8.8