|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
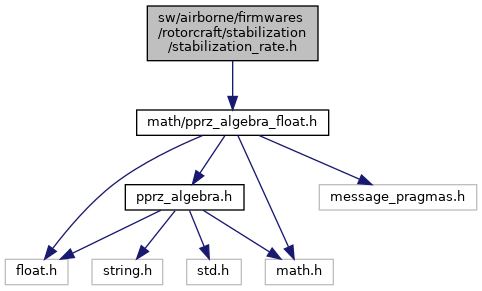
#include "math/pprz_algebra_float.h" Include dependency graph for stabilization_rate.h: This graph shows which files directly or indirectly include this file:
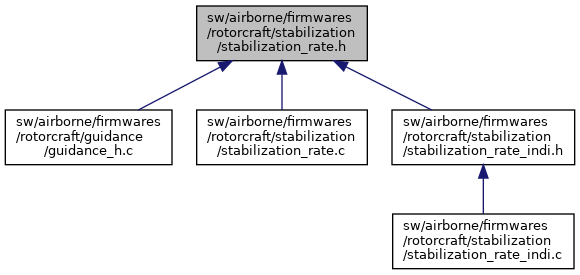
Include dependency graph for stabilization_rate.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | stabilization_rate_init (void) |
| Initialize rate controller. More... | |
| void | stabilization_rate_read_rc (void) |
| Read RC comands with roll and yaw sticks. More... | |
| void | stabilization_rate_read_rc_switched_sticks (void) |
| Read rc with roll and yaw sitcks switched if the default orientation is vertical but airplane sticks are desired. More... | |
| void | stabilization_rate_run (bool in_flight) |
| Run indi rate interface from the "stabilization_rate_run" function. More... | |
| void | stabilization_rate_enter (void) |
| Reset rate controller. More... | |
Variables | |
| struct FloatRates | stabilization_rate_sp |
| struct FloatRates | stabilization_rate_gain |
| struct FloatRates | stabilization_rate_igain |
| struct FloatRates | stabilization_rate_sum_err |
| struct FloatRates | stabilization_rate_fb_cmd |
Rate stabilization for rotorcrafts.
Control loops for angular velocity.
Definition in file stabilization_rate.h.
| void stabilization_rate_enter | ( | void | ) |
Reset rate controller.
Definition at line 182 of file stabilization_rate.c.
References FLOAT_RATES_ZERO, stabilization_indi_enter(), and stabilization_rate_sum_err.
Referenced by guidance_h_mode_changed().
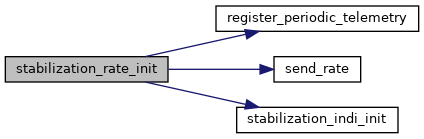
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_rate_init | ( | void | ) |
Initialize rate controller.
Definition at line 115 of file stabilization_rate.c.
References DefaultPeriodic, FLOAT_RATES_ZERO, RATES_ASSIGN, register_periodic_telemetry(), send_rate(), stabilization_indi_init(), stabilization_rate_gain, stabilization_rate_igain, STABILIZATION_RATE_IGAIN_P, STABILIZATION_RATE_IGAIN_Q, STABILIZATION_RATE_IGAIN_R, stabilization_rate_sp, and stabilization_rate_sum_err.
Here is the call graph for this function:| void stabilization_rate_read_rc | ( | void | ) |
Read RC comands with roll and yaw sticks.
Definition at line 137 of file stabilization_rate.c.
References MAX_PPRZ, FloatRates::p, PITCH_RATE_DEADBAND_EXCEEDED, FloatRates::q, FloatRates::r, radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_YAW, ROLL_RATE_DEADBAND_EXCEEDED, STABILIZATION_INDI_MAX_RATE, stabilization_rate_sp, THROTTLE_STICK_DOWN, RadioControl::values, and YAW_RATE_DEADBAND_EXCEEDED.
Referenced by guidance_h_read_rc().
Here is the caller graph for this function:| void stabilization_rate_read_rc_switched_sticks | ( | void | ) |
Read rc with roll and yaw sitcks switched if the default orientation is vertical but airplane sticks are desired.
Definition at line 160 of file stabilization_rate.c.
References MAX_PPRZ, FloatRates::p, PITCH_RATE_DEADBAND_EXCEEDED, FloatRates::q, FloatRates::r, radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_YAW, ROLL_RATE_DEADBAND_EXCEEDED, STABILIZATION_INDI_MAX_RATE, stabilization_rate_sp, THROTTLE_STICK_DOWN, RadioControl::values, and YAW_RATE_DEADBAND_EXCEEDED.
Referenced by guidance_h_read_rc().
Here is the caller graph for this function:| void stabilization_rate_run | ( | bool | in_flight | ) |
Run indi rate interface from the "stabilization_rate_run" function.
Definition at line 187 of file stabilization_rate.c.
References FLOAT_RATES_ZERO, MAX_PPRZ, MAX_SUM_ERR, FloatRates::p, FloatRates::q, FloatRates::r, RATES_ADD, RATES_BOUND_CUBE, RATES_DIFF, RATES_SDIV, stabilization_cmd, stabilization_indi_rate_run(), stabilization_rate_fb_cmd, stabilization_rate_gain, stabilization_rate_igain, stabilization_rate_sp, stabilization_rate_sum_err, and stateGetBodyRates_f().
Referenced by guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatRates stabilization_rate_fb_cmd |
Definition at line 72 of file stabilization_rate.c.
Referenced by send_rate(), and stabilization_rate_run().
| struct FloatRates stabilization_rate_gain |
Definition at line 68 of file stabilization_rate.c.
Referenced by stabilization_rate_init(), and stabilization_rate_run().
| struct FloatRates stabilization_rate_igain |
Definition at line 69 of file stabilization_rate.c.
Referenced by stabilization_rate_init(), and stabilization_rate_run().
| struct FloatRates stabilization_rate_sp |
Definition at line 67 of file stabilization_rate.c.
Referenced by send_rate(), stabilization_rate_init(), stabilization_rate_read_rc(), stabilization_rate_read_rc_switched_sticks(), and stabilization_rate_run().
| struct FloatRates stabilization_rate_sum_err |
Definition at line 70 of file stabilization_rate.c.
Referenced by send_rate(), stabilization_rate_enter(), stabilization_rate_init(), and stabilization_rate_run().
 1.8.17
1.8.17