|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|

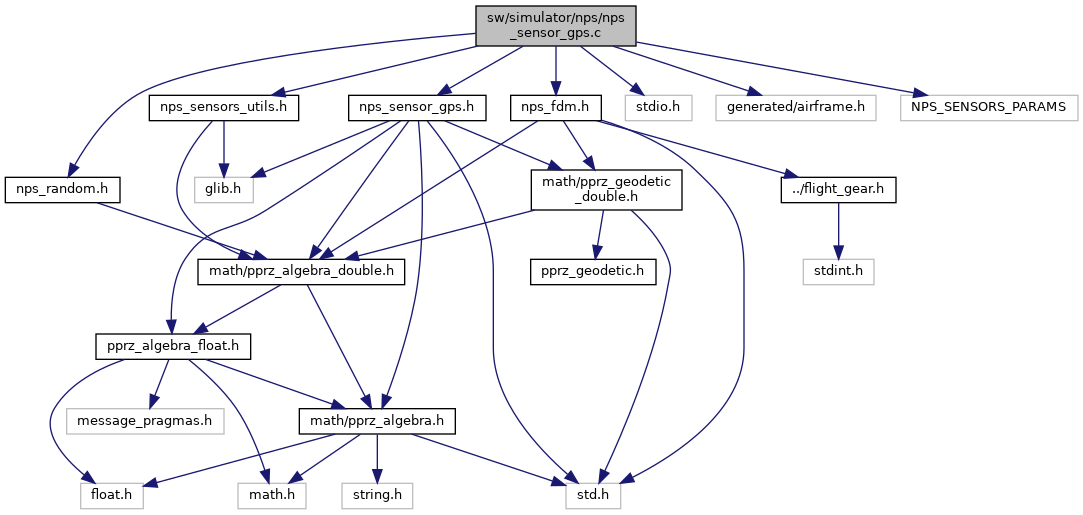
#include "nps_sensor_gps.h"#include <stdio.h>#include "generated/airframe.h"#include "nps_fdm.h"#include "nps_random.h"#include "nps_sensors_utils.h"#include <NPS_SENSORS_PARAMS> Include dependency graph for nps_sensor_gps.c:
Include dependency graph for nps_sensor_gps.c:Go to the source code of this file.
Functions | |
| void | nps_sensor_gps_init (struct NpsSensorGps *gps, double time) |
| void | nps_sensor_gps_run_step (struct NpsSensorGps *gps, double time) |
| void nps_sensor_gps_init | ( | struct NpsSensorGps * | gps, |
| double | time | ||
| ) |
Definition at line 10 of file nps_sensor_gps.c.
References GpsState::ecef_pos, GpsState::ecef_vel, FALSE, FLOAT_VECT3_ZERO, gps, GpsState::hmsl, and VECT3_ASSIGN.
Referenced by nps_sensors_init().
Here is the caller graph for this function:| void nps_sensor_gps_run_step | ( | struct NpsSensorGps * | gps, |
| double | time | ||
| ) |
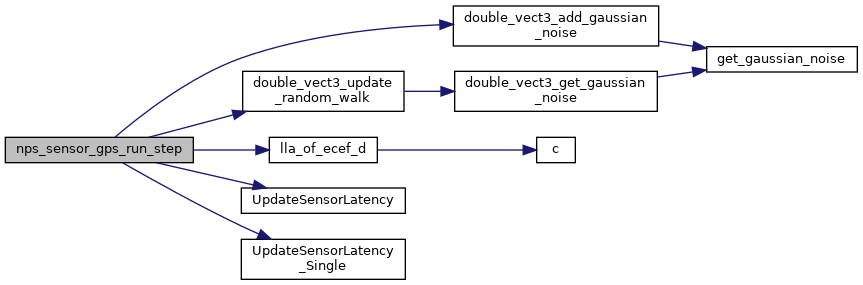
Definition at line 39 of file nps_sensor_gps.c.
References double_vect3_add_gaussian_noise(), double_vect3_update_random_walk(), NpsFdm::ecef_ecef_vel, NpsFdm::ecef_pos, GpsState::ecef_pos, GpsState::ecef_vel, fdm, gps, NpsFdm::hmsl, GpsState::hmsl, lla_of_ecef_d(), GpsState::lla_pos, TRUE, UpdateSensorLatency(), UpdateSensorLatency_Single(), VECT3_ADD, and VECT3_COPY.
Referenced by nps_sensors_run_step().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17