|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
Device independent GPS code (interface) More...
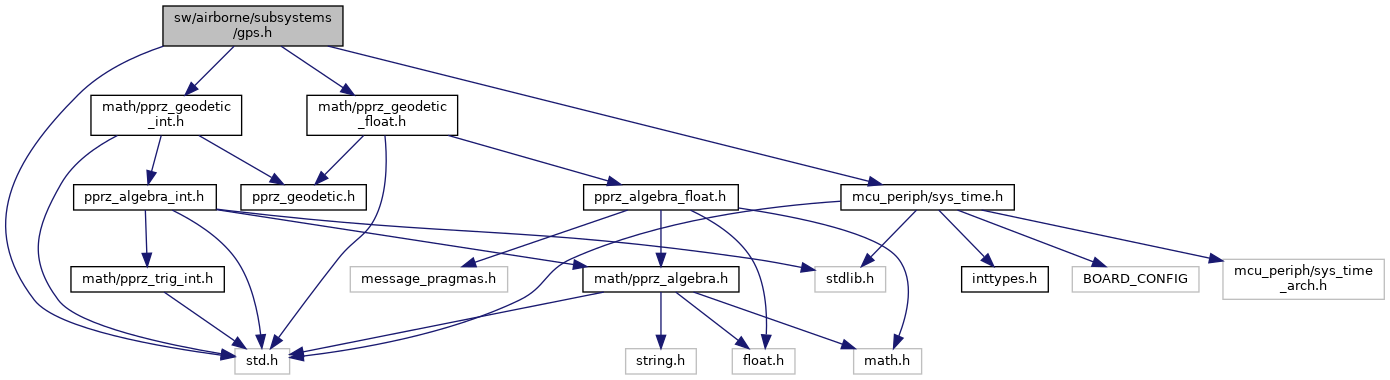
#include "std.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_geodetic_float.h"#include "mcu_periph/sys_time.h" Include dependency graph for gps.h:
Include dependency graph for gps.h:Go to the source code of this file.
Data Structures | |
| struct | SVinfo |
| data structure for Space Vehicle Information of a single satellite More... | |
| struct | GpsState |
| data structure for GPS information More... | |
| struct | GpsTimeSync |
| data structure for GPS time sync More... | |
| struct | GpsRelposNED |
| data structures for GPS with RTK capabilities More... | |
| struct | RtcmMan |
Macros | |
| #define | GPS_FIX_NONE 0x00 |
| No GPS fix. More... | |
| #define | GPS_FIX_2D 0x02 |
| 2D GPS fix More... | |
| #define | GPS_FIX_3D 0x03 |
| 3D GPS fix More... | |
| #define | GPS_FIX_DGPS 0x04 |
| DGPS fix. More... | |
| #define | GPS_FIX_RTK 0x05 |
| RTK GPS fix. More... | |
| #define | GpsFixValid() (gps.fix >= GPS_FIX_3D) |
| #define | GpsIsLost() !GpsFixValid() |
| #define | GPS_VALID_POS_ECEF_BIT 0 |
| #define | GPS_VALID_POS_LLA_BIT 1 |
| #define | GPS_VALID_POS_UTM_BIT 2 |
| #define | GPS_VALID_VEL_ECEF_BIT 3 |
| #define | GPS_VALID_VEL_NED_BIT 4 |
| #define | GPS_VALID_HMSL_BIT 5 |
| #define | GPS_VALID_COURSE_BIT 6 |
| #define | GPS_NB_CHANNELS 40 |
| #define | GPS_MODE_AUTO 0 |
| #define | GPS_MODE_PRIMARY 1 |
| #define | GPS_MODE_SECONDARY 2 |
| #define | MULTI_GPS_MODE GPS_MODE_AUTO |
| #define | __GpsId(_x) _x ## _ID |
| #define | _GpsId(_x) __GpsId(_x) |
| #define | GpsId(_x) _GpsId(_x) |
| #define | GPS_TIMEOUT 2 |
| GPS timeout in seconds. More... | |
Functions | |
| void | gps_init (void) |
| initialize the global GPS state More... | |
| void | gps_inject_data (uint8_t packet_id, uint8_t length, uint8_t *data) |
| GPS packet injection (default empty) More... | |
| static bool | gps_has_been_good (void) |
| void | gps_periodic_check (struct GpsState *gps_s) |
| Periodic GPS check. More... | |
| uint32_t | gps_tow_from_sys_ticks (uint32_t sys_ticks) |
| Convert time in sys_time ticks to GPS time of week. More... | |
| struct UtmCoor_f | utm_float_from_gps (struct GpsState *gps_s, uint8_t zone) |
| Convenience function to get utm position in float from GPS structure. More... | |
| struct UtmCoor_i | utm_int_from_gps (struct GpsState *gps_s, uint8_t zone) |
| Convenience function to get utm position in int from GPS structure. More... | |
| uint16_t | gps_day_number (uint16_t year, uint8_t month, uint8_t day) |
| Number of days since navigation epoch (6 January 1980) More... | |
| uint16_t | gps_week_number (uint16_t year, uint8_t month, uint8_t day) |
| Number of weeks since navigation epoch (6 January 1980) More... | |
Variables | |
| uint8_t | multi_gps_mode |
| struct GpsState | gps |
| global GPS state More... | |
| struct GpsTimeSync | gps_time_sync |
Device independent GPS code (interface)
Definition in file gps.h.
| struct SVinfo |
data structure for Space Vehicle Information of a single satellite
| Data Fields | ||
|---|---|---|
| int16_t | azim | azimuth in deg |
| uint8_t | cno | Carrier to Noise Ratio (Signal Strength) in dbHz. |
| int8_t | elev | elevation in deg |
| uint8_t | flags | bitfield with GPS receiver specific flags |
| uint8_t | qi | quality bitfield (GPS receiver specific) |
| uint8_t | svid | Satellite ID. |
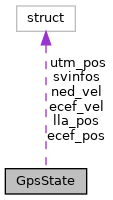
| struct GpsState |
Collaboration diagram for GpsState:| Data Fields | ||
|---|---|---|
| uint32_t | cacc | course accuracy in rad*1e7 |
| uint8_t | comp_id | id of current gps |
| int32_t | course | GPS course over ground in rad*1e7, [0, 2*Pi]*1e7 (CW/north) |
| struct EcefCoor_i | ecef_pos | position in ECEF in cm |
| struct EcefCoor_i | ecef_vel | speed ECEF in cm/s |
| uint8_t | fix | status of fix |
| uint16_t | gspeed | norm of 2d ground speed in cm/s |
| uint32_t | hacc | horizontal accuracy in cm |
| int32_t | hmsl | height above mean sea level (MSL) in mm |
| uint32_t | last_3dfix_ticks | cpu time ticks at last valid 3D fix |
| uint32_t | last_3dfix_time | cpu time in sec at last valid 3D fix |
| uint32_t | last_msg_ticks | cpu time ticks at last received GPS message |
| uint32_t | last_msg_time | cpu time in sec at last received GPS message |
| struct LlaCoor_i | lla_pos | position in LLA (lat,lon: deg*1e7; alt: mm over ellipsoid) |
| uint8_t | nb_channels | Number of scanned satellites. |
| struct NedCoor_i | ned_vel | speed NED in cm/s |
| uint8_t | num_sv | number of sat in fix |
| uint32_t | pacc | position accuracy in cm |
| uint16_t | pdop | position dilution of precision scaled by 100 |
| uint16_t | reset | hotstart, warmstart, coldstart |
| uint32_t | sacc | speed accuracy in cm/s |
| uint16_t | speed_3d | norm of 3d speed in cm/s |
| struct SVinfo | svinfos[GPS_NB_CHANNELS] | holds information from the Space Vehicles (Satellites) |
| uint32_t | tow | GPS time of week in ms. |
| struct UtmCoor_i | utm_pos | position in UTM (north,east: cm; alt: mm over MSL) |
| uint32_t | vacc | vertical accuracy in cm |
| uint8_t | valid_fields | bitfield indicating valid fields (GPS_VALID_x_BIT) |
| uint16_t | week | GPS week. |
| struct GpsTimeSync |
| struct GpsRelposNED |
| struct RtcmMan |
| #define GpsFixValid | ( | ) | (gps.fix >= GPS_FIX_3D) |
| #define GpsIsLost | ( | ) | !GpsFixValid() |
| #define MULTI_GPS_MODE GPS_MODE_AUTO |
Number of days since navigation epoch (6 January 1980)
| [in] | year | current year |
| [in] | month | current month |
| [in] | day | current day |
Definition at line 452 of file gps.c.
References month_days.
Referenced by gps_week_number().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 179 of file gps.h.
References GpsFixValid.
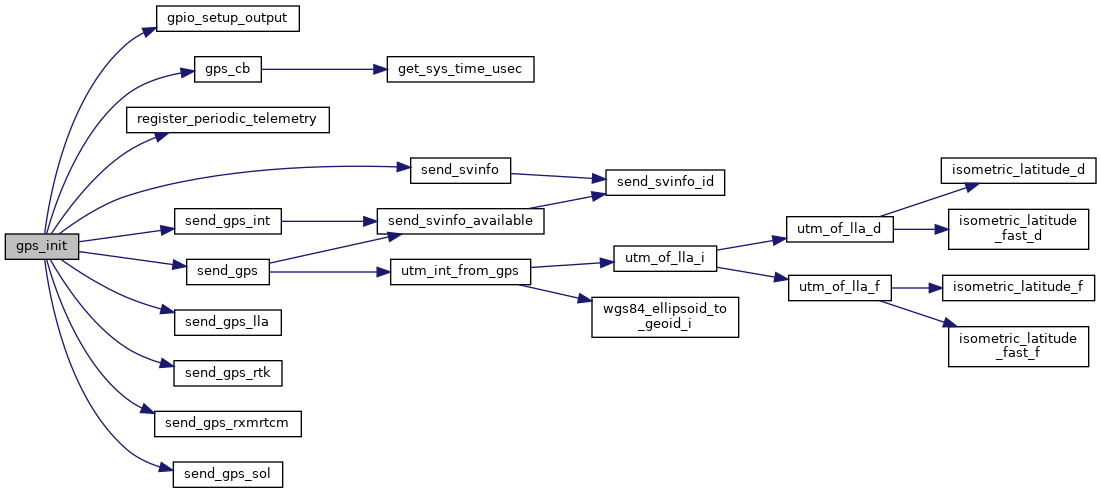
| void gps_init | ( | void | ) |
initialize the global GPS state
Definition at line 308 of file gps.c.
References ABI_BROADCAST, GpsState::cacc, RtcmMan::Cnt105, RtcmMan::Cnt177, RtcmMan::Cnt187, RtcmMan::Crc105, RtcmMan::Crc177, RtcmMan::Crc187, DefaultPeriodic, GpsState::fix, gpio_setup_output(), gps, gps_cb(), gps_ev, GPS_FIX_NONE, GPS_POWER_GPIO, GpsState::hacc, GpsState::last_3dfix_ticks, GpsState::last_3dfix_time, GpsState::last_msg_ticks, GpsState::last_msg_time, LED_OFF, MULTI_GPS_MODE, multi_gps_mode, register_periodic_telemetry(), rtcm_man, send_gps(), send_gps_int(), send_gps_lla(), send_gps_rtk(), send_gps_rxmrtcm(), send_gps_sol(), send_svinfo(), GpsState::tow, GpsState::vacc, GpsState::valid_fields, and GpsState::week.
Here is the call graph for this function:GPS packet injection (default empty)
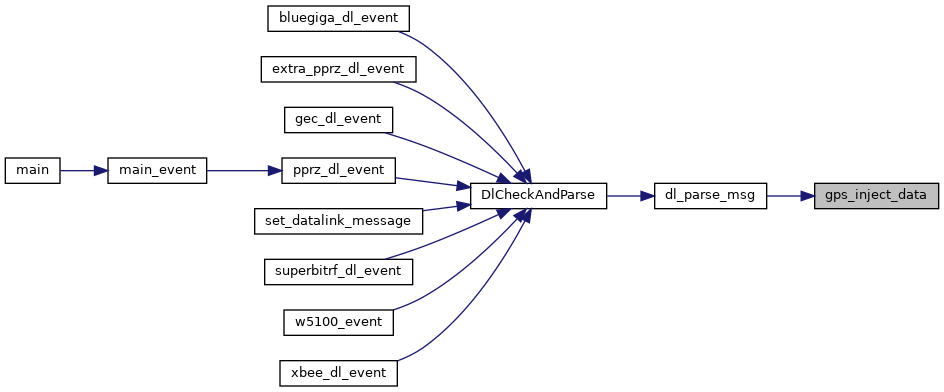
GPS packet injection (default empty)
Definition at line 408 of file gps_piksi.c.
References gps_piksi_write(), and sbp_state.
Referenced by dl_parse_msg().
Here is the call graph for this function: Here is the caller graph for this function:| void gps_periodic_check | ( | struct GpsState * | gps_s | ) |
Periodic GPS check.
Marks GPS as lost when no GPS message was received for GPS_TIMEOUT seconds
Definition at line 264 of file gps.c.
References GpsState::comp_id, GpsState::fix, gps, GPS_FIX_NONE, GPS_TIMEOUT, GpsState::last_msg_time, and sys_time::nb_sec.
Referenced by dw1000_arduino_periodic(), and intermcu_periodic().
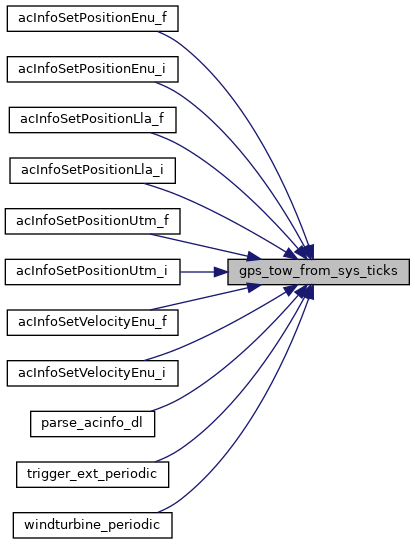
Here is the caller graph for this function:Convert time in sys_time ticks to GPS time of week.
The resolution is sys_time.resolution
Definition at line 355 of file gps.c.
References gps_time_sync, msec_of_sys_time_ticks(), MSEC_PER_WEEK, GpsTimeSync::t0_ticks, and GpsTimeSync::t0_tow.
Referenced by acInfoSetPositionEnu_f(), acInfoSetPositionEnu_i(), acInfoSetPositionLla_f(), acInfoSetPositionLla_i(), acInfoSetPositionUtm_f(), acInfoSetPositionUtm_i(), acInfoSetVelocityEnu_f(), acInfoSetVelocityEnu_i(), parse_acinfo_dl(), trigger_ext_periodic(), and windturbine_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Number of weeks since navigation epoch (6 January 1980)
| [in] | year | current year |
| [in] | month | current month |
| [in] | day | current day |
Definition at line 462 of file gps.c.
References gps_day_number().
Referenced by gps_ubx_parse_nav_pvt().
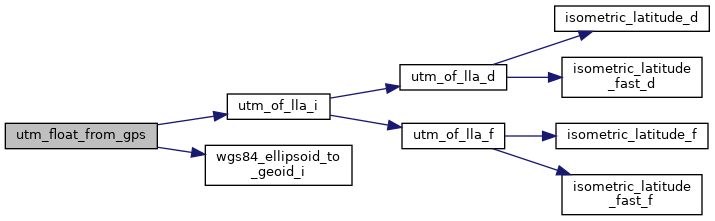
Here is the call graph for this function: Here is the caller graph for this function:Convenience function to get utm position in float from GPS structure.
Beware that altitude is initialized to zero but not set to the correct value
| [in] | gps_s | pointer to the gps structure |
| [in] | zone | set the utm zone in which the position should be computed, 0 to try to get it automatically from lla position |
Convenience function to get utm position in float from GPS structure.
Definition at line 390 of file gps.c.
References UtmCoor_f::alt, UtmCoor_f::east, GPS_VALID_HMSL_BIT, GPS_VALID_POS_LLA_BIT, GPS_VALID_POS_UTM_BIT, UTM_FLOAT_OF_BFP, utm_of_lla_i(), wgs84_ellipsoid_to_geoid_i(), UtmCoor_f::zone, and UtmCoor_i::zone.
Referenced by gps_cb(), ins_alt_float_update_gps(), ins_float_invariant_update_gps(), and ins_reset_local_origin().
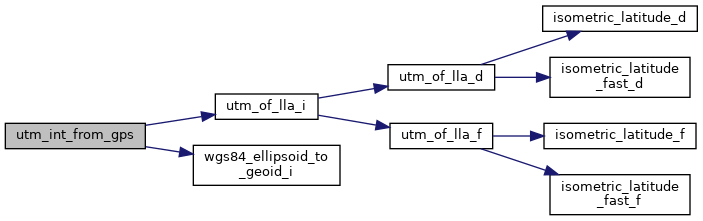
Here is the call graph for this function: Here is the caller graph for this function:Convenience function to get utm position in int from GPS structure.
Beware that altitude is initialized to zero but not set to the correct value
| [in] | gps_s | pointer to the gps structure |
| [in] | zone | set the utm zone in which the position should be computed, 0 to try to get it automatically from lla position |
Definition at line 415 of file gps.c.
References UtmCoor_i::alt, UtmCoor_i::east, GPS_VALID_HMSL_BIT, GPS_VALID_POS_LLA_BIT, GPS_VALID_POS_UTM_BIT, UTM_COPY, utm_of_lla_i(), wgs84_ellipsoid_to_geoid_i(), and UtmCoor_i::zone.
Referenced by send_gps().
Here is the call graph for this function: Here is the caller graph for this function:| struct GpsState gps |
global GPS state
Definition at line 69 of file gps.c.
Referenced by airspeed_ets_read_event(), alt_filter_periodic(), apogee_baro_event(), ArduIMU_periodicGPS(), baro_sim_periodic(), calculate_new_heading(), dc_send_shot_position(), draw_osd(), error_output(), formation_flight(), generic_com_periodic(), geo_mag_event(), get_fix_mode(), gps_cb(), gps_init(), gps_periodic_check(), gps_sim_hitl_event(), gps_sim_hitl_init(), gps_sim_init(), gps_sim_publish(), gps_vectornav_init(), gsm_send_report_continue(), gx3_packet_read_message(), hff_update_gps(), home_direction(), humid_sht_periodic(), ins_reset_altitude_ref(), ins_reset_local_origin(), ins_reset_utm_zone(), ins_vectornav_monitor(), ins_vectornav_propagate(), ins_vectornav_set_pacc(), ins_vectornav_set_sacc(), mavlink_send_gps_raw_int(), mavlink_send_gps_status(), meteo_stick_periodic(), mf_daq_send_report(), mf_ptu_periodic(), nps_sensor_gps_init(), nps_sensor_gps_run_step(), parse_xsens_msg(), potential_task(), push_gps_to_vision(), put_alt(), send_fp_min(), send_gps(), send_gps_int(), send_gps_lla(), send_gps_sol(), send_status(), send_svinfo(), send_svinfo_available(), send_svinfo_id(), sim_use_gps_pos(), snav_on_time(), tcas_periodic_task_1Hz(), temod_event(), thd_startlog(), and update_geoid_height().
| struct GpsTimeSync gps_time_sync |
Definition at line 70 of file gps.c.
Referenced by gps_cb(), and gps_tow_from_sys_ticks().
| uint8_t multi_gps_mode |
Definition at line 78 of file gps.c.
Referenced by gps_init().
 1.8.17
1.8.17