|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
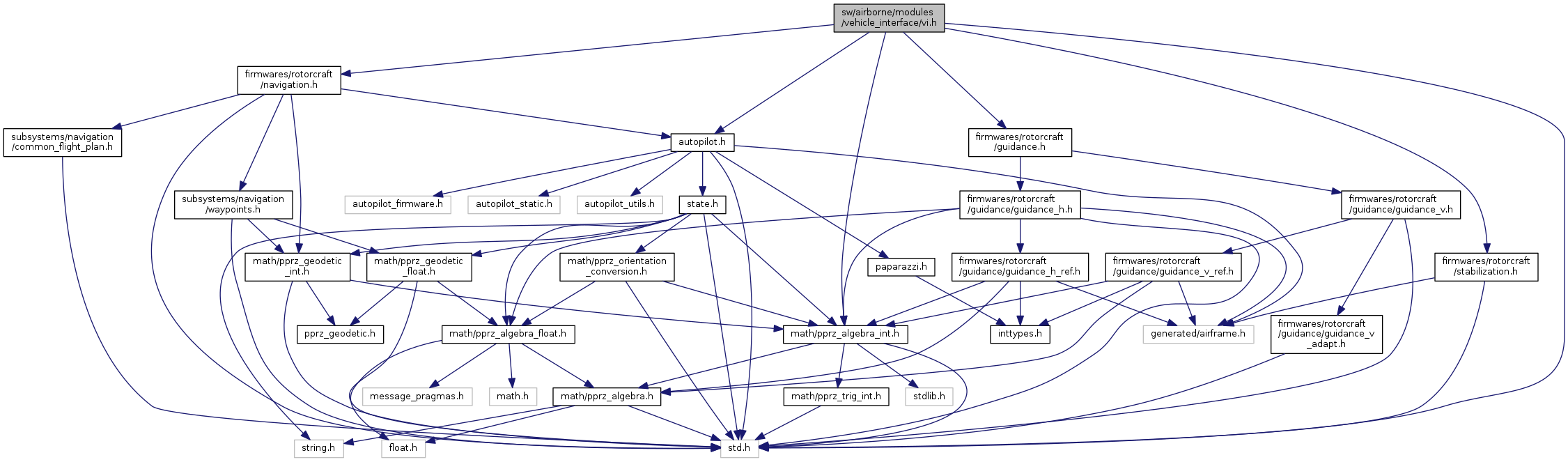
#include "std.h"#include "math/pprz_algebra_int.h"#include "autopilot.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/guidance.h"#include "firmwares/rotorcraft/navigation.h" Include dependency graph for vi.h: This graph shows which files directly or indirectly include this file:
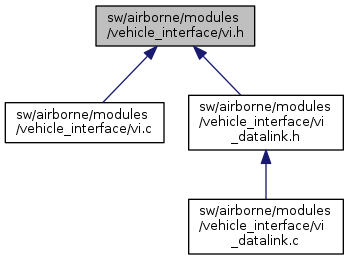
Include dependency graph for vi.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | Vi_imu_info |
| struct | Vi_gps_info |
| struct | Vi_ahrs_info |
| struct | Vi_info |
| struct | Vi_command |
| struct | VehicleInterface |
| union | Vi_command.h_sp |
| union | Vi_command.v_sp |
Macros | |
| #define | vi_SetEnabled(_val) |
Functions | |
| void | vi_init (void) |
| void | vi_set_enabled (bool enabled) |
| void | vi_periodic (void) |
| void | vi_update_info (void) |
| void | vi_notify_imu_available (void) |
| void | vi_notify_mag_available (void) |
| void | vi_notify_gps_available (void) |
| void | vi_notify_baro_abs_available (void) |
| void | vi_impl_init (void) |
| void | vi_impl_periodic (void) |
| void | vi_impl_set_enabled (bool enabled) |
Variables | |
| struct VehicleInterface | vi |
| struct Vi_imu_info |
Collaboration diagram for Vi_imu_info:| Data Fields | ||
|---|---|---|
| struct Int16Vect3 | accel | |
| struct Int16Vect3 | gyro | |
| struct Int16Vect3 | mag | |
| struct Vi_gps_info |
Collaboration diagram for Vi_gps_info:| Data Fields | ||
|---|---|---|
| uint8_t | fix | |
| uint8_t | num_sv | |
| int32_t | pacc | |
| struct Int32Vect3 | pos | |
| struct Int16Vect3 | speed | |
| struct Vi_ahrs_info |
Collaboration diagram for Vi_ahrs_info:| Data Fields | ||
|---|---|---|
| struct Int16Eulers | euler | |
| struct Int16Eulers | rate | |
| struct Vi_info |
Collaboration diagram for Vi_info:| Data Fields | ||
|---|---|---|
| struct Vi_ahrs_info | ahrs | |
| struct Vi_gps_info | gps | |
| struct Vi_imu_info | imu | |
| struct Vi_command |
| Data Fields | ||
|---|---|---|
| uint8_t | h_mode | |
| union Vi_command | h_sp | |
| uint8_t | v_mode | |
| union Vi_command | v_sp | |
| struct VehicleInterface |
| union Vi_command.h_sp |
| Data Fields | ||
|---|---|---|
| struct Int32Eulers | attitude | |
| struct Int32Vect3 | pos | |
| struct Int32Vect3 | rate | |
| struct Int32Vect3 | speed | |
| union Vi_command.v_sp |
| #define vi_SetEnabled | ( | _val | ) |
| void vi_impl_init | ( | void | ) |
Definition at line 24 of file vi_datalink.c.
Referenced by vi_init().
Here is the caller graph for this function:| void vi_impl_periodic | ( | void | ) |
Definition at line 28 of file vi_datalink.c.
Referenced by vi_periodic().
Here is the caller graph for this function:| void vi_impl_set_enabled | ( | bool | enabled | ) |
Definition at line 32 of file vi_datalink.c.
Referenced by vi_set_enabled().
Here is the caller graph for this function:| void vi_init | ( | void | ) |
Definition at line 36 of file vi.c.
References VehicleInterface::enabled, GUIDANCE_H_MODE_ATTITUDE, GUIDANCE_V_MODE_CLIMB, Vi_command::h_mode, Vi_command::h_sp, VehicleInterface::input, INT_EULERS_ZERO, VehicleInterface::last_msg, VehicleInterface::timeouted, Vi_command::v_mode, Vi_command::v_sp, vi, vi_impl_init(), and VI_TIMEOUT.
Here is the call graph for this function:| void vi_notify_baro_abs_available | ( | void | ) |
| void vi_notify_gps_available | ( | void | ) |
| void vi_notify_imu_available | ( | void | ) |
| void vi_notify_mag_available | ( | void | ) |
| void vi_periodic | ( | void | ) |
Definition at line 51 of file vi.c.
References GUIDANCE_H_MODE_ATTITUDE, GUIDANCE_V_MODE_CLIMB, Vi_command::h_mode, Vi_command::h_sp, VehicleInterface::input, INT_EULERS_ZERO, VehicleInterface::last_msg, VehicleInterface::timeouted, Vi_command::v_mode, Vi_command::v_sp, vi, vi_impl_periodic(), and VI_TIMEOUT.
Here is the call graph for this function:| void vi_set_enabled | ( | bool | enabled | ) |
Definition at line 67 of file vi.c.
References vi_impl_set_enabled().
Here is the call graph for this function:| struct VehicleInterface vi |
Definition at line 30 of file vi.c.
Referenced by vi_init(), vi_periodic(), and vi_update_wp().
 1.8.8
1.8.8