|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Automatic takeoff assistance for fixed-wing. More...
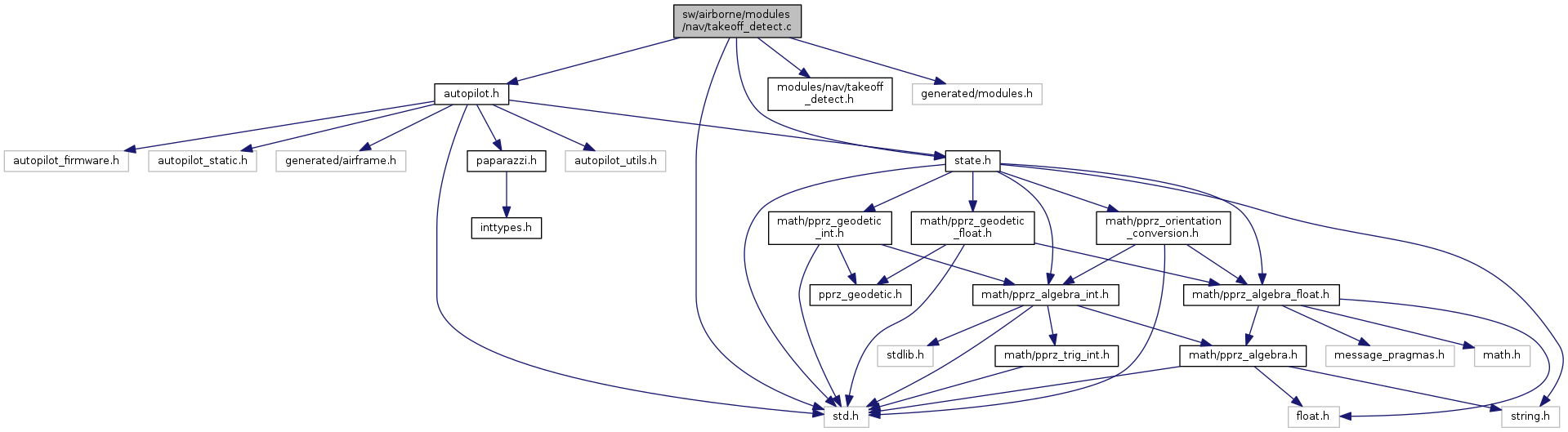
#include "std.h"#include "modules/nav/takeoff_detect.h"#include "autopilot.h"#include "state.h"#include "generated/modules.h" Include dependency graph for takeoff_detect.c:
Include dependency graph for takeoff_detect.c:Go to the source code of this file.
Data Structures | |
| struct | takeoff_detect_struct |
| Takeoff detection structure. More... | |
Macros | |
| #define | TAKEOFF_DETECT_LAUNCH_PITCH RadOfDeg(30.) |
| Default pitch angle to trigger launch. More... | |
| #define | TAKEOFF_DETECT_ABORT_PITCH RadOfDeg(-20.) |
| Default pitch angle to cancel launch. More... | |
| #define | TAKEOFF_DETECT_TIMER 2. |
| Detection timer in seconds. More... | |
| #define | TAKEOFF_DETECT_DISABLE_TIMER 4. |
| Disable timer in seconds. More... | |
Enumerations | |
| enum | takeoff_detect_state { TO_DETECT_DISABLED, TO_DETECT_ARMED, TO_DETECT_LAUNCHING } |
| Takeoff detection states. More... | |
Functions | |
| void | takeoff_detect_init (void) |
| Init function. More... | |
| void | takeoff_detect_start (void) |
| Start function called once before periodic. More... | |
| void | takeoff_detect_periodic (void) |
| Periodic call. More... | |
Variables | |
| static struct takeoff_detect_struct | takeoff_detect |
Automatic takeoff assistance for fixed-wing.
The planes's launching can be triggered/aborted by pointing the nose up or down for a given time.
Definition in file takeoff_detect.c.
| struct takeoff_detect_struct |
Takeoff detection structure.
Definition at line 64 of file takeoff_detect.c.
| Data Fields | ||
|---|---|---|
| enum takeoff_detect_state | state | |
| uint32_t | timer | |
| #define TAKEOFF_DETECT_ABORT_PITCH RadOfDeg(-20.) |
Default pitch angle to cancel launch.
Definition at line 43 of file takeoff_detect.c.
Referenced by takeoff_detect_periodic().
| #define TAKEOFF_DETECT_DISABLE_TIMER 4. |
Disable timer in seconds.
Definition at line 53 of file takeoff_detect.c.
Referenced by takeoff_detect_periodic().
| #define TAKEOFF_DETECT_LAUNCH_PITCH RadOfDeg(30.) |
Default pitch angle to trigger launch.
Definition at line 38 of file takeoff_detect.c.
Referenced by takeoff_detect_periodic().
| #define TAKEOFF_DETECT_TIMER 2. |
Detection timer in seconds.
Definition at line 48 of file takeoff_detect.c.
Referenced by takeoff_detect_periodic().
| enum takeoff_detect_state |
Takeoff detection states.
| Enumerator | |
|---|---|
| TO_DETECT_DISABLED | |
| TO_DETECT_ARMED | |
| TO_DETECT_LAUNCHING | |
Definition at line 57 of file takeoff_detect.c.
| void takeoff_detect_init | ( | void | ) |
Init function.
Definition at line 72 of file takeoff_detect.c.
| void takeoff_detect_periodic | ( | void | ) |
Periodic call.
Definition at line 85 of file takeoff_detect.c.
References AP_MODE_AUTO2, autopilot, autopilot_get_mode(), pprz_autopilot::launch, takeoff_detect_struct::state, stateGetNedToBodyEulers_f(), takeoff_detect, TAKEOFF_DETECT_ABORT_PITCH, TAKEOFF_DETECT_DISABLE_TIMER, TAKEOFF_DETECT_LAUNCH_PITCH, TAKEOFF_DETECT_TIMER, takeoff_detect_struct::timer, TO_DETECT_ARMED, TO_DETECT_DISABLED, and TO_DETECT_LAUNCHING.
Here is the call graph for this function:| void takeoff_detect_start | ( | void | ) |
Start function called once before periodic.
Definition at line 78 of file takeoff_detect.c.
References takeoff_detect_struct::state, takeoff_detect, takeoff_detect_struct::timer, and TO_DETECT_ARMED.
|
static |
Definition at line 69 of file takeoff_detect.c.
Referenced by takeoff_detect_periodic(), and takeoff_detect_start().
 1.8.8
1.8.8