|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
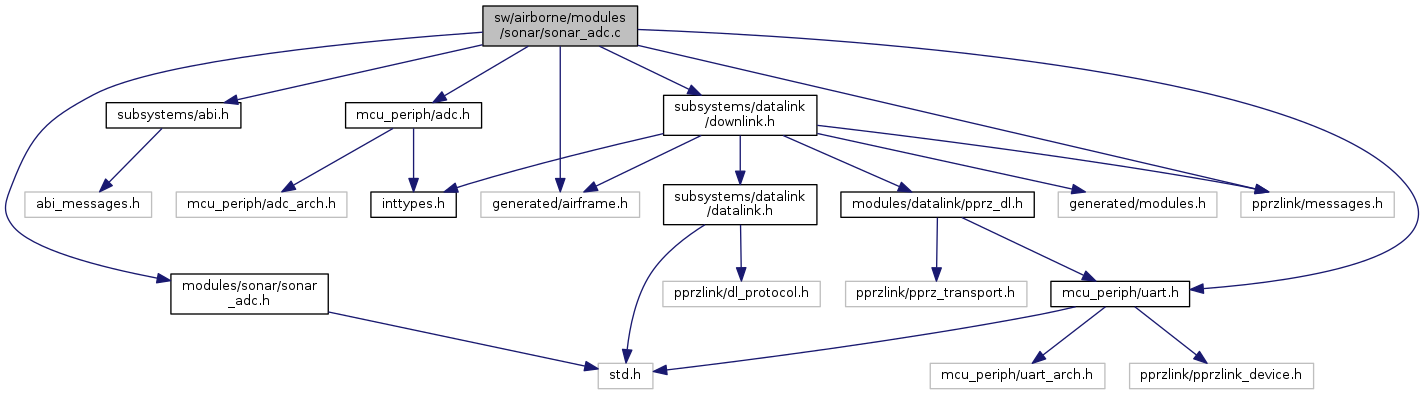
#include "modules/sonar/sonar_adc.h"#include "generated/airframe.h"#include "mcu_periph/adc.h"#include "subsystems/abi.h"#include "mcu_periph/uart.h"#include "pprzlink/messages.h"#include "subsystems/datalink/downlink.h" Include dependency graph for sonar_adc.c:
Include dependency graph for sonar_adc.c:Go to the source code of this file.
Macros | |
| #define | SONAR_OFFSET 0 |
| Sonar offset. More... | |
| #define | SONAR_SCALE 0.0166 |
| Sonar scale. More... | |
Functions | |
| void | sonar_adc_init (void) |
| void | sonar_adc_read (void) |
| Read ADC value to update sonar measurement. More... | |
Variables | |
| struct SonarAdc | sonar_adc |
| static struct adc_buf | sonar_adc_buf |
| #define SONAR_OFFSET 0 |
Sonar offset.
Offset value in ADC equals to the ADC value so that height is zero
Definition at line 40 of file sonar_adc.c.
Referenced by sonar_adc_init().
| #define SONAR_SCALE 0.0166 |
Sonar scale.
Sensor sensitivity in m/adc (float)
Definition at line 47 of file sonar_adc.c.
Referenced by sonar_adc_read().
| void sonar_adc_init | ( | void | ) |
Definition at line 56 of file sonar_adc.c.
References adc_buf_channel(), DEFAULT_AV_NB_SAMPLE, SonarAdc::meas, SonarAdc::offset, sonar_adc, sonar_adc_buf, and SONAR_OFFSET.
Here is the call graph for this function:| void sonar_adc_read | ( | void | ) |
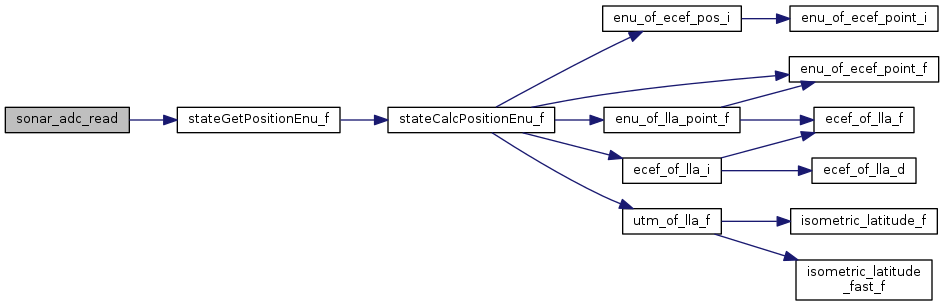
Read ADC value to update sonar measurement.
Definition at line 68 of file sonar_adc.c.
References AGL_SONAR_ADC_ID, adc_buf::av_nb_sample, DefaultChannel, DefaultDevice, SonarAdc::distance, SonarAdc::meas, SonarAdc::offset, sonar_adc, sonar_adc_buf, SONAR_SCALE, stateGetPositionEnu_f(), adc_buf::sum, and EnuCoor_f::z.
Here is the call graph for this function:| struct SonarAdc sonar_adc |
Definition at line 50 of file sonar_adc.c.
Referenced by sonar_adc_init(), and sonar_adc_read().
|
static |
Definition at line 53 of file sonar_adc.c.
Referenced by sonar_adc_init(), and sonar_adc_read().
 1.8.8
1.8.8