|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Autopilot generated implementation Calls the code generated from autopilot XML file. More...
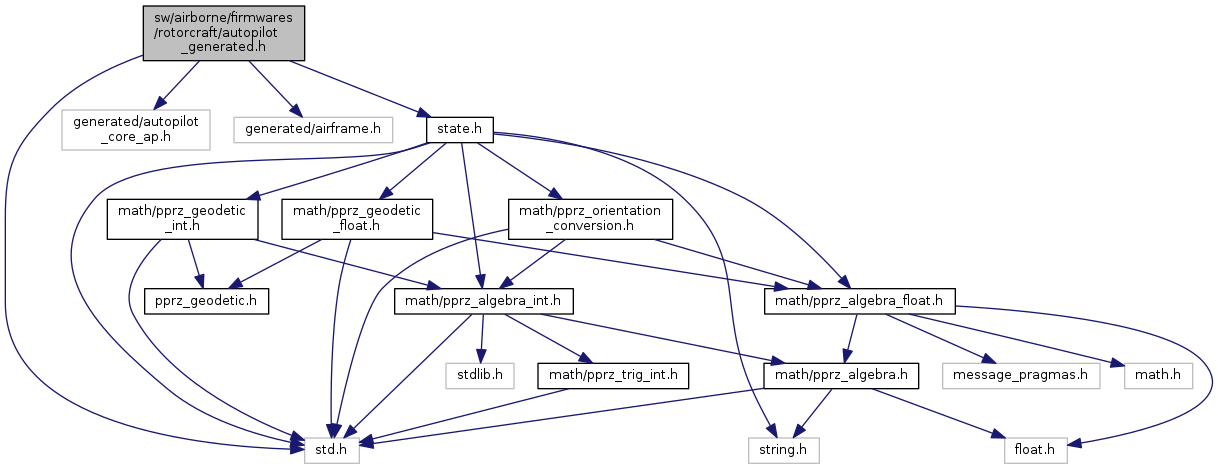
#include "std.h"#include "generated/autopilot_core_ap.h"#include "generated/airframe.h"#include "state.h" Include dependency graph for autopilot_generated.h: This graph shows which files directly or indirectly include this file:
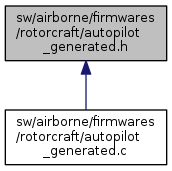
Include dependency graph for autopilot_generated.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | autopilot_generated_init (void) |
| void | autopilot_generated_periodic (void) |
| void | autopilot_generated_on_rc_frame (void) |
| void | autopilot_generated_set_mode (uint8_t new_autopilot_mode) |
| void | autopilot_generated_SetModeHandler (float new_autopilot_mode) |
| AP mode setting handler. More... | |
| void | autopilot_generated_set_motors_on (bool motors_on) |
Autopilot generated implementation Calls the code generated from autopilot XML file.
Definition in file autopilot_generated.h.
| void autopilot_generated_init | ( | void | ) |
Definition at line 41 of file autopilot_generated.c.
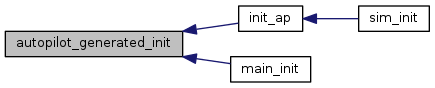
References autopilot, autopilot_arming_init(), and pprz_autopilot::mode.
Referenced by init_ap(), and main_init().
Here is the call graph for this function: Here is the caller graph for this function:| void autopilot_generated_on_rc_frame | ( | void | ) |
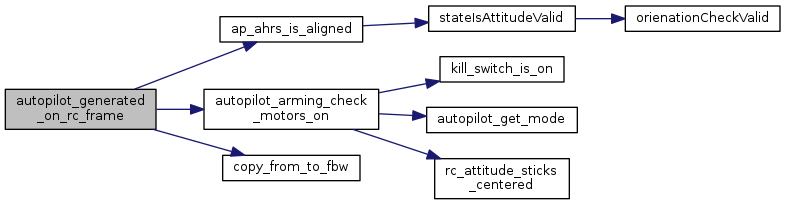
Definition at line 103 of file autopilot_generated.c.
References ap_ahrs_is_aligned(), autopilot, autopilot_arming_check_motors_on(), copy_from_to_fbw(), current, energy, pprz_autopilot::kill_throttle, pprz_autopilot::motors_on, and vsupply.
Referenced by autopilot_on_rc_frame().
Here is the call graph for this function: Here is the caller graph for this function:| void autopilot_generated_periodic | ( | void | ) |
Definition at line 50 of file autopilot_generated.c.
References autopilot, autopilot_in_flight(), pprz_autopilot::detect_ground_once, pprz_autopilot::ground_detected, inter_mcu_received_ap, link_mcu_send(), and pprz_autopilot::mode.
Referenced by autopilot_periodic().
Here is the call graph for this function: Here is the caller graph for this function:| void autopilot_generated_set_mode | ( | uint8_t | new_autopilot_mode | ) |
Definition at line 77 of file autopilot_generated.c.
References autopilot, and pprz_autopilot::mode.
Referenced by autopilot_generated_SetModeHandler(), and autopilot_set_mode().
Here is the caller graph for this function:| void autopilot_generated_set_motors_on | ( | bool | motors_on | ) |
Definition at line 85 of file autopilot_generated.c.
References ap_ahrs_is_aligned(), AP_MODE_KILL, autopilot, autopilot_arming_set(), pprz_autopilot::mode, and pprz_autopilot::motors_on.
Referenced by autopilot_set_motors_on().
Here is the call graph for this function: Here is the caller graph for this function:| void autopilot_generated_SetModeHandler | ( | float | mode | ) |
AP mode setting handler.
FIXME generated something else for this?
Definition at line 71 of file autopilot_generated.c.
References autopilot_generated_set_mode().
Referenced by autopilot_SetModeHandler().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8