|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Rotorcraft navigation functions. More...
#include "firmwares/rotorcraft/navigation.h"#include "pprz_debug.h"#include "subsystems/gps.h"#include "subsystems/ins.h"#include "state.h"#include "autopilot.h"#include "generated/modules.h"#include "generated/flight_plan.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "math/pprz_algebra_int.h"#include "subsystems/datalink/downlink.h"#include "pprzlink/messages.h"#include "mcu_periph/uart.h"#include "subsystems/datalink/telemetry.h"#include <stdio.h> Include dependency graph for navigation.c:
Include dependency graph for navigation.c:Go to the source code of this file.
Macros | |
| #define | NAV_C |
| #define | DEFAULT_CIRCLE_RADIUS 5. |
| default nav_circle_radius in meters More... | |
| #define | NAV_CLIMB_VSPEED 0.5 |
| #define | NAV_DESCEND_VSPEED -0.8 |
| #define | ARRIVED_AT_WAYPOINT 3.0 |
| minimum horizontal distance to waypoint to mark as arrived More... | |
| #define | FAILSAFE_MODE_DISTANCE (1.5*MAX_DIST_FROM_HOME) |
| Maximum distance from HOME waypoint before going into failsafe mode. More... | |
| #define | CLOSE_TO_WAYPOINT (15 << INT32_POS_FRAC) |
| #define | CARROT_DIST (12 << INT32_POS_FRAC) |
| #define | LINE_START_FUNCTION {} |
| #define | LINE_STOP_FUNCTION {} |
Enumerations | |
| enum | oval_status { OR12, OC2, OR21, OC1, OR12, OC2, OR21, OC1 } |
Functions | |
| static void | nav_set_altitude (void) |
| void | set_exception_flag (uint8_t flag_num) |
| static void | send_segment (struct transport_tx *trans, struct link_device *dev) |
| static void | send_circle (struct transport_tx *trans, struct link_device *dev) |
| static void | send_nav_status (struct transport_tx *trans, struct link_device *dev) |
| static void | send_wp_moved (struct transport_tx *trans, struct link_device *dev) |
| void | nav_init (void) |
| Navigation Initialisation. More... | |
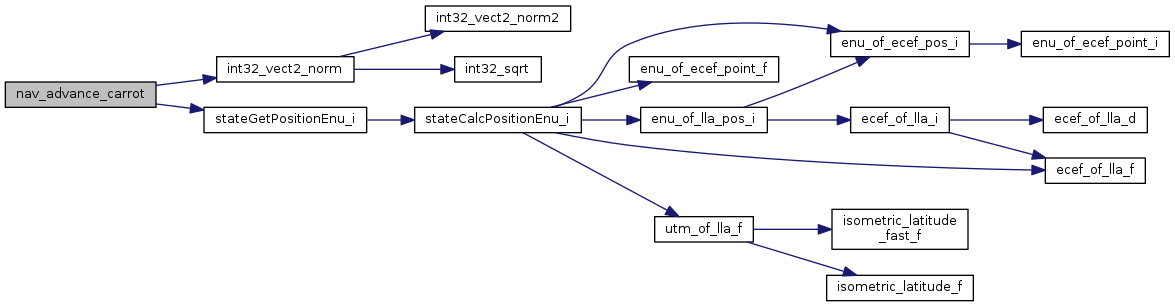
| static void UNUSED | nav_advance_carrot (void) |
| void | nav_run (void) |
| bool | nav_approaching_from (struct EnuCoor_i *wp, struct EnuCoor_i *from, int16_t approaching_time) |
| Proximity tests on approaching a wp. More... | |
| bool | nav_check_wp_time (struct EnuCoor_i *wp, uint16_t stay_time) |
| Check the time spent in a radius of 'ARRIVED_AT_WAYPOINT' around a wp. More... | |
| void | nav_reset_reference (void) |
| Reset the geographic reference to the current GPS fix. More... | |
| void | nav_reset_alt (void) |
| void | nav_init_stage (void) |
| needs to be implemented by fixedwing and rotorcraft seperately More... | |
| void | nav_periodic_task (void) |
| Navigation main: call to the code generated from the XML flight plan. More... | |
| void | navigation_update_wp_from_speed (uint8_t wp, struct Int16Vect3 speed_sp, int16_t heading_rate_sp) |
| bool | nav_detect_ground (void) |
| bool | nav_is_in_flight (void) |
| void | nav_home (void) |
| Home mode navigation. More... | |
| void | nav_set_manual (int32_t roll, int32_t pitch, int32_t yaw) |
| Set manual roll, pitch and yaw without stabilization. More... | |
| float | get_dist2_to_point (struct EnuCoor_i *p) |
| Returns squared horizontal distance to given point. More... | |
| float | get_dist2_to_waypoint (uint8_t wp_id) |
| Returns squared horizontal distance to given waypoint. More... | |
| void | compute_dist2_to_home (void) |
| Computes squared distance to the HOME waypoint potentially sets too_far_from_home. More... | |
| void | nav_set_heading_rad (float rad) |
| Set nav_heading in radians. More... | |
| void | nav_set_heading_deg (float deg) |
| Set nav_heading in degrees. More... | |
| void | nav_set_heading_towards (float x, float y) |
| Set heading to point towards x,y position in local coordinates. More... | |
| void | nav_set_heading_towards_waypoint (uint8_t wp) |
| Set heading in the direction of a waypoint. More... | |
| void | nav_set_heading_towards_target (void) |
| Set heading in the direction of the target. More... | |
| void | nav_set_heading_current (void) |
| Set heading to the current yaw angle. More... | |
| void | nav_set_failsafe (void) |
| void | nav_circle (struct EnuCoor_i *wp_center, int32_t radius) |
| void | nav_route (struct EnuCoor_i *wp_start, struct EnuCoor_i *wp_end) |
| void | nav_oval_init (void) |
| void | nav_oval (uint8_t p1, uint8_t p2, float radius) |
| Navigation along a figure O. More... | |
| void | nav_follow (uint8_t _ac_id, uint32_t distance, uint32_t height) |
Rotorcraft navigation functions.
Definition in file navigation.c.
| #define ARRIVED_AT_WAYPOINT 3.0 |
minimum horizontal distance to waypoint to mark as arrived
Definition at line 68 of file navigation.c.
Referenced by nav_approaching_from(), and nav_check_wp_time().
| #define CARROT_DIST (12 << INT32_POS_FRAC) |
Definition at line 77 of file navigation.c.
Referenced by nav_advance_carrot(), nav_circle(), and nav_route().
| #define CLOSE_TO_WAYPOINT (15 << INT32_POS_FRAC) |
Definition at line 76 of file navigation.c.
Referenced by nav_advance_carrot().
| #define DEFAULT_CIRCLE_RADIUS 5. |
default nav_circle_radius in meters
Definition at line 55 of file navigation.c.
Referenced by nav_anemotaxis(), nav_anemotaxis_init(), nav_chemotaxis(), and nav_init().
| #define FAILSAFE_MODE_DISTANCE (1.5*MAX_DIST_FROM_HOME) |
Maximum distance from HOME waypoint before going into failsafe mode.
Definition at line 73 of file navigation.c.
| #define LINE_START_FUNCTION {} |
Definition at line 615 of file navigation.c.
Referenced by nav_oval().
| #define LINE_STOP_FUNCTION {} |
Definition at line 618 of file navigation.c.
Referenced by nav_oval().
| #define NAV_C |
Definition at line 29 of file navigation.c.
| #define NAV_CLIMB_VSPEED 0.5 |
Definition at line 59 of file navigation.c.
Referenced by nav_init().
| #define NAV_DESCEND_VSPEED -0.8 |
Definition at line 63 of file navigation.c.
Referenced by nav_init().
| enum oval_status |
| Enumerator | |
|---|---|
| OR12 | |
| OC2 | |
| OR21 | |
| OC1 | |
| OR12 | |
| OC2 | |
| OR21 | |
| OC1 | |
Definition at line 621 of file navigation.c.
| void compute_dist2_to_home | ( | void | ) |
Computes squared distance to the HOME waypoint potentially sets too_far_from_home.
Definition at line 473 of file navigation.c.
Referenced by autopilot_static_periodic(), nav_home(), and nav_periodic_task().
Here is the caller graph for this function:| float get_dist2_to_point | ( | struct EnuCoor_i * | p | ) |
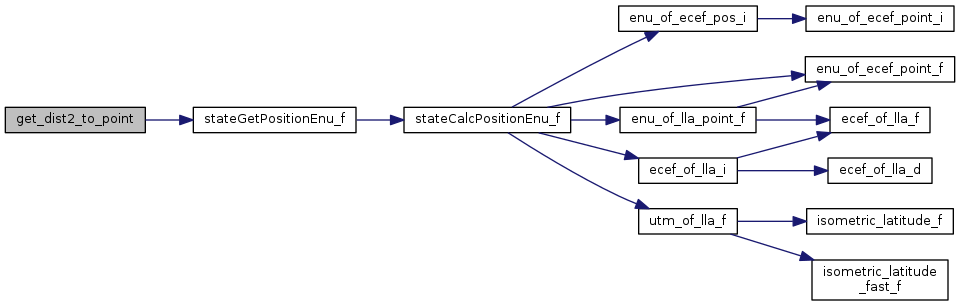
Returns squared horizontal distance to given point.
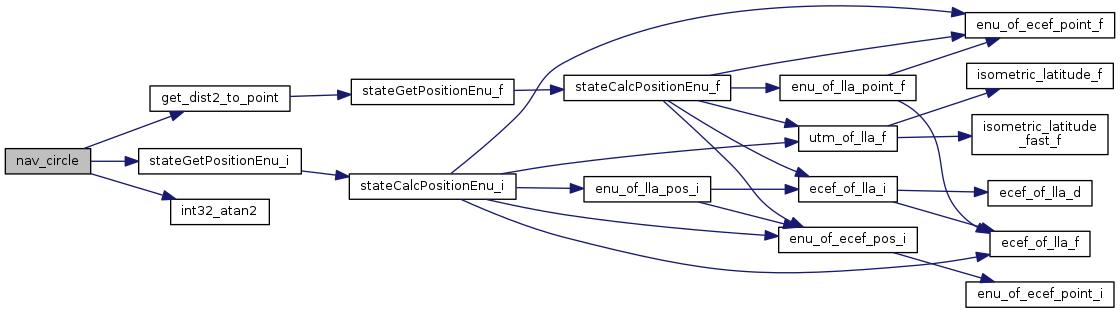
Definition at line 455 of file navigation.c.
References POS_FLOAT_OF_BFP, stateGetPositionEnu_f(), FloatVect2::x, EnuCoor_f::x, EnuCoor_i::x, FloatVect2::y, EnuCoor_f::y, and EnuCoor_i::y.
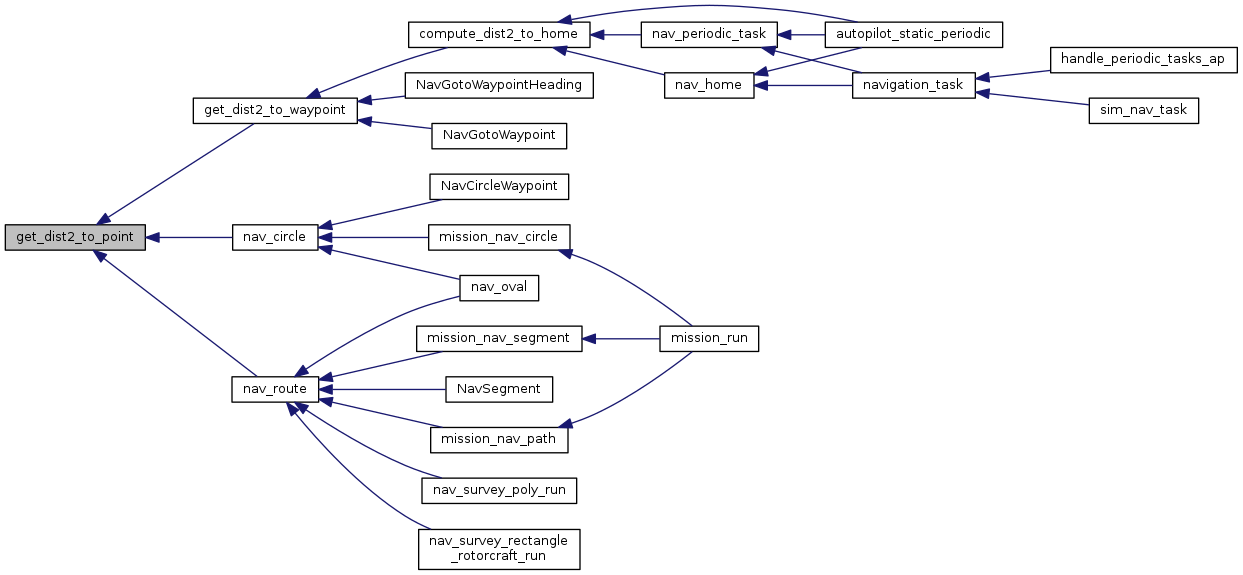
Referenced by get_dist2_to_waypoint(), nav_circle(), and nav_route().
Here is the call graph for this function: Here is the caller graph for this function:| float get_dist2_to_waypoint | ( | uint8_t | wp_id | ) |
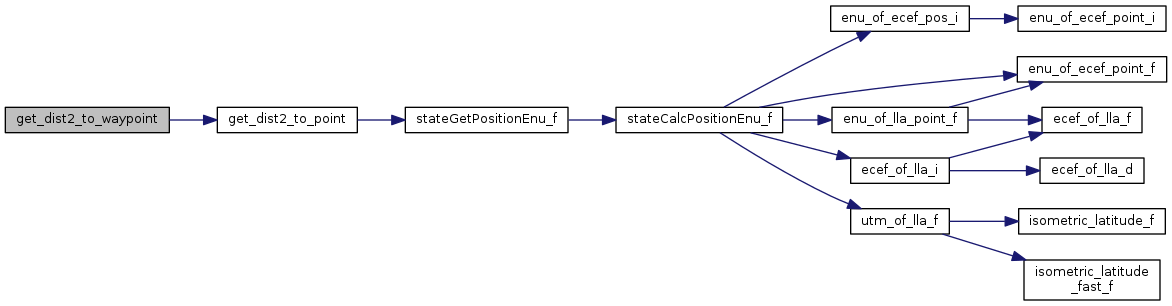
Returns squared horizontal distance to given waypoint.
Definition at line 465 of file navigation.c.
References get_dist2_to_point(), and waypoints.
Referenced by compute_dist2_to_home(), NavGotoWaypoint(), and NavGotoWaypointHeading().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 221 of file navigation.c.
References CARROT_DIST, CLOSE_TO_WAYPOINT, int32_vect2_norm(), navigation_carrot, navigation_target, stateGetPositionEnu_i(), VECT2_COPY, VECT2_DIFF, VECT2_SDIV, VECT2_SMUL, VECT2_STRIM, and VECT2_SUM.
Referenced by nav_run().
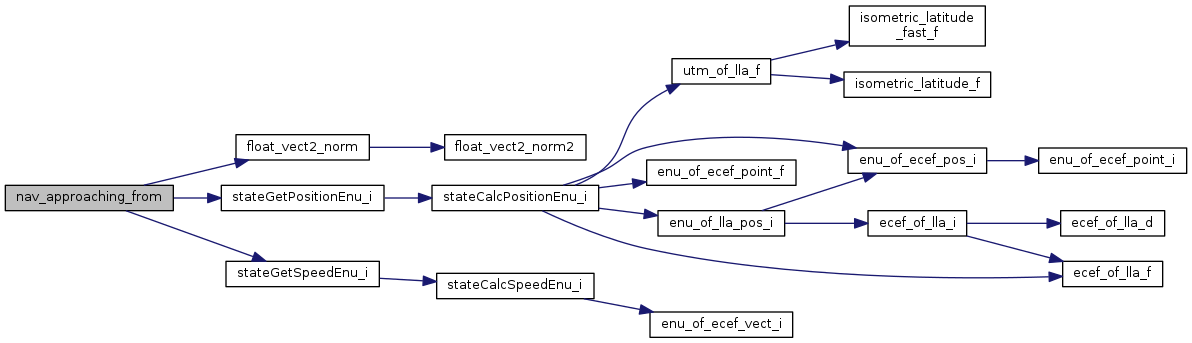
Here is the call graph for this function: Here is the caller graph for this function:| bool nav_approaching_from | ( | struct EnuCoor_i * | wp, |
| struct EnuCoor_i * | from, | ||
| int16_t | approaching_time | ||
| ) |
Proximity tests on approaching a wp.
Definition at line 257 of file navigation.c.
References ARRIVED_AT_WAYPOINT, float_vect2_norm(), INT32_POS_FRAC, INT32_SPEED_FRAC, INT32_VECT2_RSHIFT, POS_FLOAT_OF_BFP, stateGetPositionEnu_i(), stateGetSpeedEnu_i(), VECT2_DIFF, VECT2_SMUL, VECT2_SUM, FloatVect2::x, Int32Vect2::x, FloatVect2::y, and Int32Vect2::y.
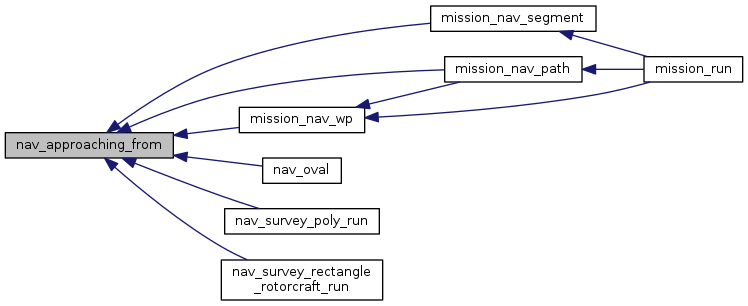
Referenced by mission_nav_path(), mission_nav_segment(), mission_nav_wp(), nav_oval(), nav_survey_poly_run(), and nav_survey_rectangle_rotorcraft_run().
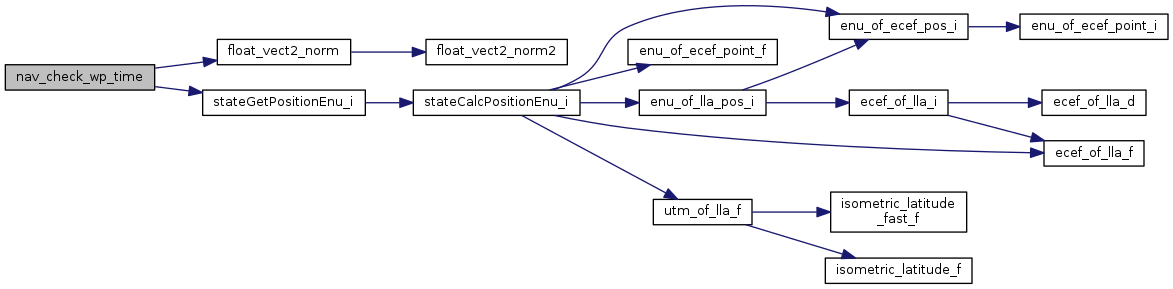
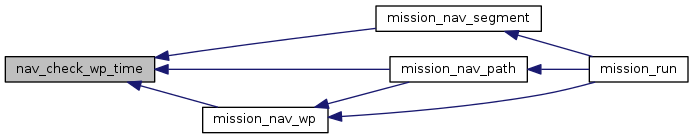
Here is the call graph for this function: Here is the caller graph for this function:Check the time spent in a radius of 'ARRIVED_AT_WAYPOINT' around a wp.
Definition at line 301 of file navigation.c.
References ARRIVED_AT_WAYPOINT, autopilot, pprz_autopilot::flight_time, float_vect2_norm(), INT_VECT3_ZERO, POS_FLOAT_OF_BFP, stateGetPositionEnu_i(), VECT2_DIFF, EnuCoor_i::x, Int32Vect2::x, EnuCoor_i::y, and Int32Vect2::y.
Referenced by mission_nav_path(), mission_nav_segment(), and mission_nav_wp().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 538 of file navigation.c.
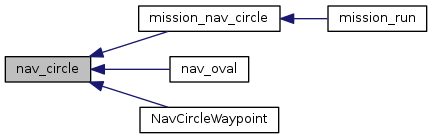
References CARROT_DIST, dist2_to_wp, get_dist2_to_point(), horizontal_mode, HORIZONTAL_MODE_CIRCLE, INT32_ANGLE_FRAC, INT32_ANGLE_NORMALIZE, INT32_ANGLE_PI, INT32_ANGLE_PI_4, int32_atan2(), INT32_TRIG_FRAC, INT32_VECT2_RSHIFT, nav_circle_center, nav_circle_qdr, nav_circle_radians, nav_circle_radius, navigation_target, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, radius, stateGetPositionEnu_i(), VECT2_ASSIGN, VECT2_COPY, VECT2_DIFF, VECT2_SUM, Int32Vect2::x, and Int32Vect2::y.
Referenced by mission_nav_circle(), nav_oval(), and NavCircleWaypoint().
Here is the call graph for this function: Here is the caller graph for this function:| bool nav_detect_ground | ( | void | ) |
Definition at line 408 of file navigation.c.
References autopilot, and pprz_autopilot::ground_detected.
Definition at line 738 of file navigation.c.
| void nav_home | ( | void | ) |
Home mode navigation.
Home mode navigation (circle around HOME)
Nominal speed
Definition at line 421 of file navigation.c.
References compute_dist2_to_home(), dist2_to_home, dist2_to_wp, FAILSAFE_HOME_RADIUS, ground_alt, horizontal_mode, HORIZONTAL_MODE_WAYPOINT, nav_altitude, nav_flight_altitude, nav_run(), nav_set_altitude(), NavCircleWaypoint, navigation_target, v_ctl_mode, V_CTL_MODE_AUTO_ALT, VECT3_COPY, vertical_mode, VERTICAL_MODE_ALT, and waypoints.
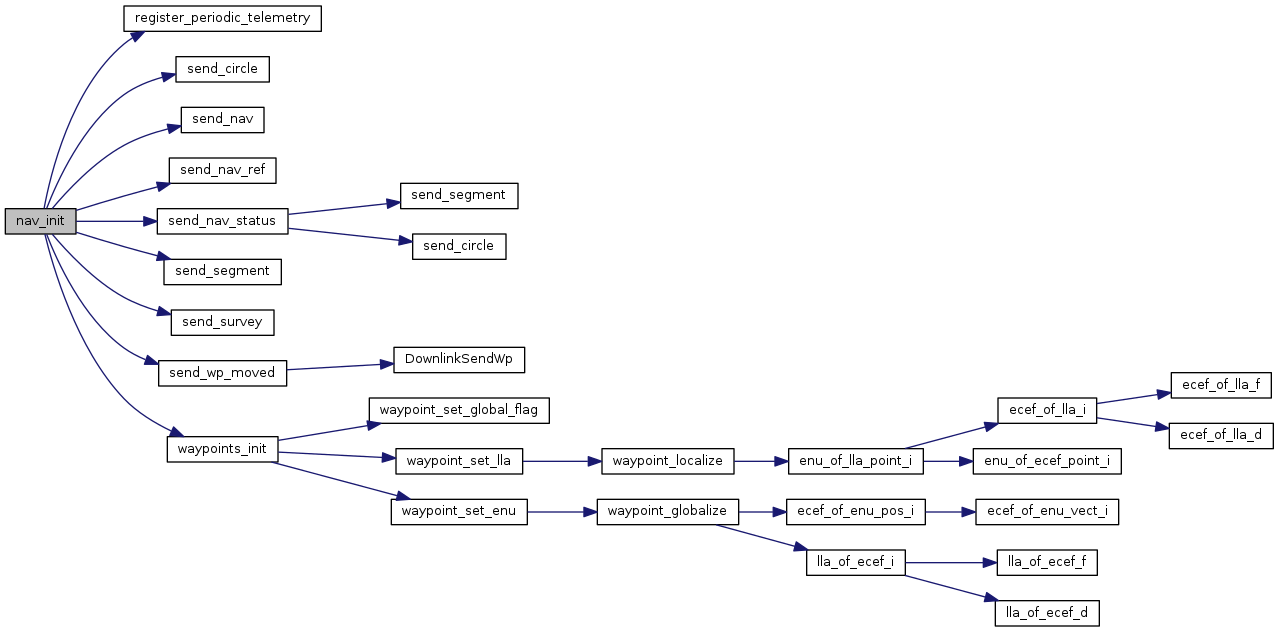
Here is the call graph for this function:| void nav_init | ( | void | ) |
Navigation Initialisation.
Definition at line 179 of file navigation.c.
References DEFAULT_CIRCLE_RADIUS, DefaultPeriodic, dist2_to_home, dist2_to_wp, flight_altitude, ground_alt, horizontal_mode, HORIZONTAL_MODE_WAYPOINT, nav_altitude, nav_block, nav_climb, NAV_CLIMB_VSPEED, nav_climb_vspeed, nav_cmd_pitch, nav_cmd_roll, nav_cmd_yaw, NAV_DESCEND_VSPEED, nav_descend_vspeed, nav_flight_altitude, NAV_GLIDE_PITCH_TRIM, nav_heading, nav_leg_length, nav_leg_progress, NAV_MODE_COURSE, nav_pitch, nav_radius, nav_roll, nav_stage, nav_throttle, navigation_carrot, navigation_target, POS_BFP_OF_REAL, register_periodic_telemetry(), send_circle(), send_nav(), send_nav_ref(), send_nav_status(), send_segment(), send_survey(), send_wp_moved(), too_far_from_home, VECT3_COPY, vertical_mode, VERTICAL_MODE_ALT, waypoints, and waypoints_init().
Here is the call graph for this function:| void nav_init_stage | ( | void | ) |
needs to be implemented by fixedwing and rotorcraft seperately
Definition at line 361 of file navigation.c.
References nav_circle_radians, nav_last_point, stage_time, stateGetPositionEnu_f(), stateGetPositionEnu_i(), VECT3_COPY, EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function:| bool nav_is_in_flight | ( | void | ) |
Definition at line 415 of file navigation.c.
References autopilot_in_flight().
Referenced by follow_me().
Here is the call graph for this function: Here is the caller graph for this function:Navigation along a figure O.
One side leg is defined by waypoints [p1] and [p2]. The navigation goes through 4 states: OC1 (half circle next to [p1]), OR21 (route [p2] to [p1], OC2 (half circle next to [p2]) and OR12 (opposite leg). Initial state is the route along the desired segment (OC2).
Definition at line 637 of file navigation.c.
References point::a, ANGLE_BFP_OF_REAL, CARROT, InitStage, INT32_ANGLE_PI, int32_atan2_2(), INT32_DEG_OF_RAD, LINE_START_FUNCTION, LINE_STOP_FUNCTION, nav_approaching_from(), nav_approaching_xy(), nav_circle(), nav_circle_XY(), nav_oval_count, nav_route(), nav_route_xy(), NavQdrCloseTo, OC1, OC2, OR12, OR21, POS_BFP_OF_REAL, radius, waypoints, point::x, and point::y.
Here is the call graph for this function:| void nav_oval_init | ( | void | ) |
Definition at line 625 of file navigation.c.
References nav_oval_count, and OC2.
| void nav_periodic_task | ( | void | ) |
Navigation main: call to the code generated from the XML flight plan.
Definition at line 369 of file navigation.c.
References block_time, compute_dist2_to_home(), dist2_to_wp, h_ctl_course_pre_bank, NAV_FREQ, nav_run(), nav_set_altitude(), nav_survey_active, stage_time, V_CTL_AUTO_THROTTLE_STANDARD, v_ctl_auto_throttle_submode, v_ctl_mode, and V_CTL_MODE_AUTO_CLIMB.
Here is the call graph for this function:| void nav_reset_alt | ( | void | ) |
Definition at line 355 of file navigation.c.
| void nav_reset_reference | ( | void | ) |
Reset the geographic reference to the current GPS fix.
Definition at line 348 of file navigation.c.
Definition at line 584 of file navigation.c.
References CARROT_DIST, dist2_to_wp, get_dist2_to_point(), horizontal_mode, HORIZONTAL_MODE_ROUTE, INT32_POS_FRAC, int32_sqrt(), INT32_VECT2_RSHIFT, Max, nav_leg_length, nav_leg_progress, nav_segment_end, navigation_target, stateGetPositionEnu_i(), VECT2_COPY, VECT2_DIFF, VECT2_SMUL, VECT2_SUM, Int32Vect2::x, and Int32Vect2::y.
Referenced by mission_nav_path(), mission_nav_segment(), nav_oval(), nav_survey_poly_run(), nav_survey_rectangle_rotorcraft_run(), and NavSegment().
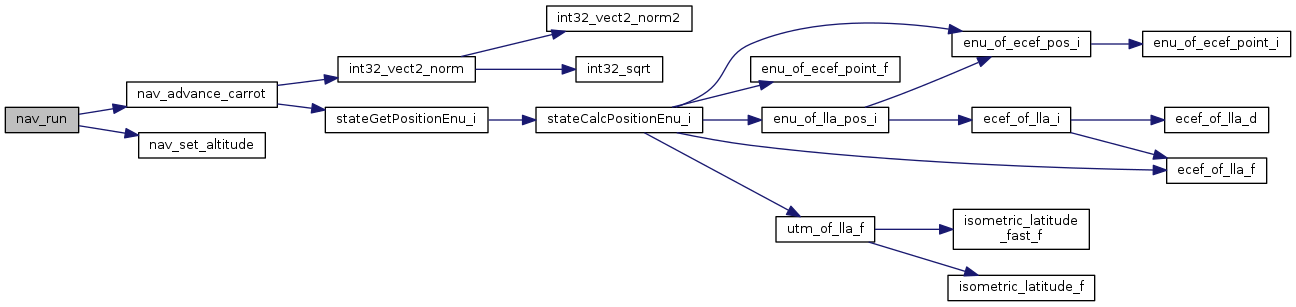
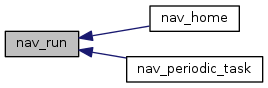
Here is the call graph for this function: Here is the caller graph for this function:| void nav_run | ( | void | ) |
Definition at line 243 of file navigation.c.
References nav_advance_carrot(), nav_set_altitude(), navigation_carrot, navigation_target, and VECT2_COPY.
Referenced by nav_home(), and nav_periodic_task().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Definition at line 337 of file navigation.c.
References nav_altitude, nav_flight_altitude, and POS_BFP_OF_REAL.
Referenced by nav_run().
Here is the caller graph for this function:| void nav_set_failsafe | ( | void | ) |
Definition at line 528 of file navigation.c.
References AP_MODE_FAILSAFE, and autopilot_set_mode().
Here is the call graph for this function:| void nav_set_heading_current | ( | void | ) |
Set heading to the current yaw angle.
Definition at line 523 of file navigation.c.
References nav_heading, Int32Eulers::psi, and stateGetNedToBodyEulers_i().
Here is the call graph for this function:| void nav_set_heading_deg | ( | float | deg | ) |
Set nav_heading in degrees.
Definition at line 491 of file navigation.c.
References nav_set_heading_rad().
Referenced by nav_survey_poly_setup(), and nav_survey_rectangle_rotorcraft_setup().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_set_heading_rad | ( | float | rad | ) |
Set nav_heading in radians.
Definition at line 484 of file navigation.c.
References ANGLE_BFP_OF_REAL, INT32_COURSE_NORMALIZE, and nav_heading.
Referenced by nav_set_heading_deg(), and stereocam_droplet_periodic().
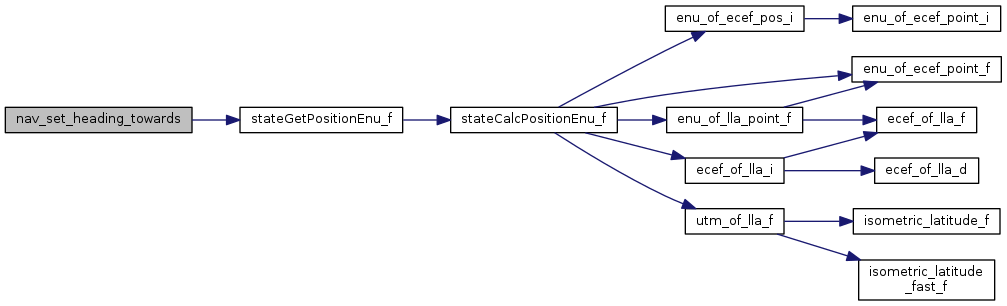
Here is the caller graph for this function:| void nav_set_heading_towards | ( | float | x, |
| float | y | ||
| ) |
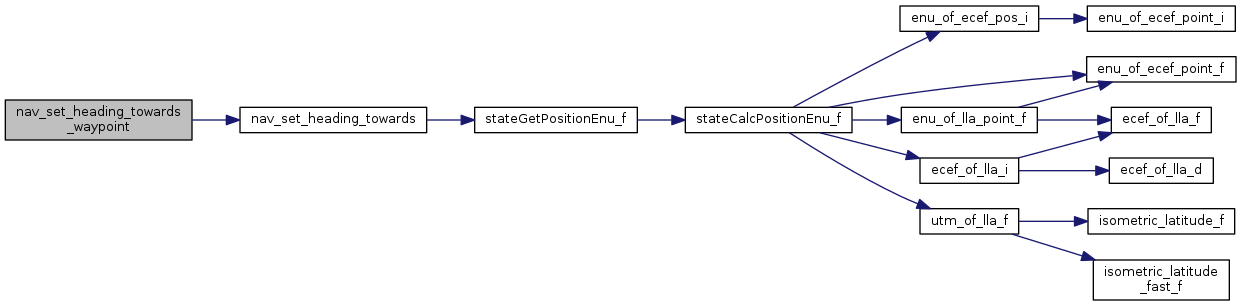
Set heading to point towards x,y position in local coordinates.
Definition at line 497 of file navigation.c.
References ANGLE_BFP_OF_REAL, nav_heading, stateGetPositionEnu_f(), VECT2_DIFF, VECT2_NORM2, FloatVect2::x, and FloatVect2::y.
Referenced by nav_set_heading_towards_target(), and nav_set_heading_towards_waypoint().
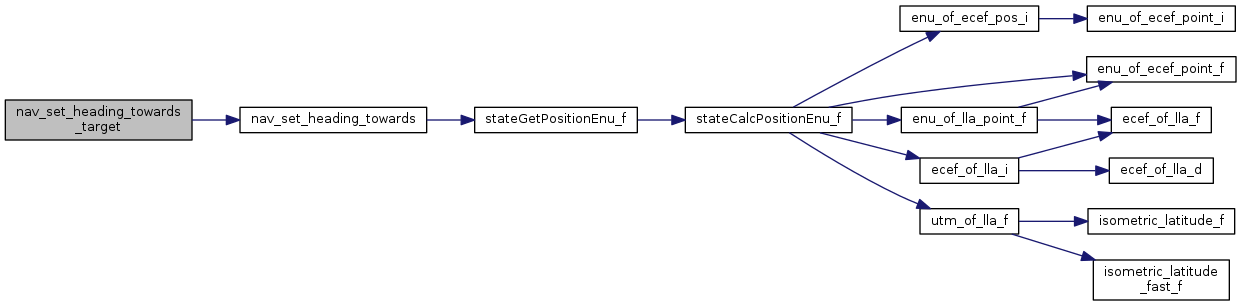
Here is the call graph for this function: Here is the caller graph for this function:| void nav_set_heading_towards_target | ( | void | ) |
Set heading in the direction of the target.
Definition at line 516 of file navigation.c.
References nav_set_heading_towards(), navigation_target, POS_FLOAT_OF_BFP, EnuCoor_i::x, and EnuCoor_i::y.
Here is the call graph for this function:| void nav_set_heading_towards_waypoint | ( | uint8_t | wp | ) |
Set heading in the direction of a waypoint.
Definition at line 510 of file navigation.c.
References nav_set_heading_towards(), WaypointX, and WaypointY.
Referenced by NavGotoWaypointHeading().
Here is the call graph for this function: Here is the caller graph for this function:Set manual roll, pitch and yaw without stabilization.
| [in] | roll | command in pprz scale (int32_t) |
| [in] | pitch | command in pprz scale (int32_t) |
| [in] | yaw | command in pprz scale (int32_t) |
This function allows to directly set commands from the flight plan, if in nav_manual mode. This is for instance useful for helicopters during the spinup
Definition at line 446 of file navigation.c.
References horizontal_mode, HORIZONTAL_MODE_MANUAL, nav_cmd_pitch, nav_cmd_roll, and nav_cmd_yaw.
| void navigation_update_wp_from_speed | ( | uint8_t | wp, |
| struct Int16Vect3 | speed_sp, | ||
| int16_t | heading_rate_sp | ||
| ) |
Definition at line 384 of file navigation.c.
References DefaultChannel, DefaultDevice, INT32_COURSE_NORMALIZE, INT32_POS_FRAC, INT32_SPEED_FRAC, INT32_TRIG_FRAC, INT32_VECT3_RSHIFT, NAV_FREQ, nav_heading, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, VECT3_SDIV, waypoints, point::x, Int32Vect3::x, point::y, Int32Vect3::y, and Int32Vect3::z.
Referenced by vi_update_wp().
Here is the caller graph for this function:
|
static |
Definition at line 142 of file navigation.c.
References nav_circle_center, nav_circle_radius, POS_FLOAT_OF_BFP, EnuCoor_i::x, and EnuCoor_i::y.
Referenced by send_nav_status().
Here is the caller graph for this function:
|
static |
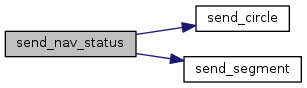
Definition at line 150 of file navigation.c.
References block_time, dist2_to_home, dist2_to_wp, horizontal_mode, HORIZONTAL_MODE_CIRCLE, HORIZONTAL_MODE_ROUTE, nav_block, nav_stage, send_circle(), send_segment(), and stage_time.
Referenced by nav_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 133 of file navigation.c.
References nav_segment_end, POS_FLOAT_OF_BFP, EnuCoor_i::x, and EnuCoor_i::y.
Referenced by send_nav_status().
Here is the caller graph for this function:
|
static |
Definition at line 166 of file navigation.c.
References nb_waypoint, waypoints, point::x, and point::y.
Referenced by nav_init().
Here is the caller graph for this function:| void set_exception_flag | ( | uint8_t | flag_num | ) |
Definition at line 128 of file navigation.c.
References exception_flag.
| float dist2_to_home |
squared distance to home waypoint
Definition at line 82 of file navigation.c.
Referenced by autopilot_static_periodic(), compute_dist2_to_home(), monitor_task(), nav_home(), nav_init(), and send_nav_status().
| float dist2_to_wp |
squared distance to next waypoint
Definition at line 85 of file navigation.c.
Referenced by nav_approaching_xy(), nav_circle(), nav_home(), nav_init(), nav_periodic_task(), nav_route(), and send_nav_status().
| bool exception_flag[10] = {0} |
Definition at line 94 of file navigation.c.
Referenced by set_exception_flag().
| float failsafe_mode_dist2 = FAILSAFE_MODE_DISTANCE * FAILSAFE_MODE_DISTANCE |
maximum squared distance to home wp before going to failsafe mode
Definition at line 81 of file navigation.c.
Referenced by autopilot_static_periodic().
| float flight_altitude |
Dynamically adjustable, reset to nav_altitude when it is changing.
Definition at line 112 of file navigation.c.
Referenced by nav_init().
| uint8_t horizontal_mode |
Definition at line 96 of file navigation.c.
Referenced by nav_circle(), nav_home(), nav_init(), nav_route(), nav_set_manual(), and send_nav_status().
| const float max_dist2_from_home = MAX_DIST_FROM_HOME * MAX_DIST_FROM_HOME |
Definition at line 80 of file navigation.c.
Referenced by compute_dist2_to_home().
| const float max_dist_from_home = MAX_DIST_FROM_HOME |
Definition at line 79 of file navigation.c.
Referenced by mission_point_of_lla().
| int32_t nav_altitude |
Definition at line 111 of file navigation.c.
Referenced by nav_home(), nav_init(), and nav_set_altitude().
| struct EnuCoor_i nav_circle_center |
Definition at line 115 of file navigation.c.
Referenced by nav_circle(), and send_circle().
| int32_t nav_circle_qdr |
Definition at line 116 of file navigation.c.
Referenced by nav_circle().
| int32_t nav_circle_radians |
Status on the current circle.
Definition at line 116 of file navigation.c.
Referenced by nav_circle(), and nav_init_stage().
| int32_t nav_circle_radius |
Definition at line 116 of file navigation.c.
Referenced by nav_circle(), and send_circle().
| int32_t nav_climb |
Definition at line 111 of file navigation.c.
Referenced by nav_init().
| float nav_climb_vspeed |
Definition at line 107 of file navigation.c.
Referenced by nav_init().
| int32_t nav_cmd_pitch |
Definition at line 105 of file navigation.c.
Referenced by guidance_h_from_nav(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_init(), and nav_set_manual().
| int32_t nav_cmd_roll |
Definition at line 105 of file navigation.c.
Referenced by guidance_h_from_nav(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_init(), and nav_set_manual().
| int32_t nav_cmd_yaw |
Definition at line 105 of file navigation.c.
Referenced by guidance_h_from_nav(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_init(), and nav_set_manual().
| float nav_descend_vspeed |
Definition at line 107 of file navigation.c.
Referenced by nav_init().
| int32_t nav_flight_altitude |
Definition at line 111 of file navigation.c.
Referenced by guidance_v_from_nav(), nav_home(), nav_init(), and nav_set_altitude().
| int32_t nav_heading |
with INT32_ANGLE_FRAC
Definition at line 104 of file navigation.c.
Referenced by follow_me(), guidance_h_from_nav(), guidance_h_nav_enter(), moveWaypointForwards(), nav_init(), nav_set_heading_current(), nav_set_heading_rad(), nav_set_heading_towards(), navigation_update_wp_from_speed(), rotorcraft_cam_periodic(), run_avoid_navigation_onvision(), and stereocam_droplet_periodic().
| struct EnuCoor_i nav_last_point |
Definition at line 90 of file navigation.c.
Referenced by nav_init_stage().
| uint32_t nav_leg_length |
Definition at line 99 of file navigation.c.
Referenced by nav_init(), and nav_route().
| int32_t nav_leg_progress |
Definition at line 98 of file navigation.c.
Referenced by nav_init(), nav_route(), and NavGlide().
| uint8_t nav_oval_count |
Navigation along a figure O.
One side leg is defined by waypoints [p1] and [p2]. The navigation goes through 4 states: OC1 (half circle next to [p1]), OR21 (route [p2] to [p1], OC2 (half circle next to [p2]) and OR12 (opposite leg).
Initial state is the route along the desired segment (OC2).
Definition at line 623 of file navigation.c.
Referenced by nav_oval(), and nav_oval_init().
| int32_t nav_pitch |
| float nav_radius |
Definition at line 106 of file navigation.c.
Referenced by nav_init().
| int32_t nav_roll |
Definition at line 103 of file navigation.c.
Referenced by guidance_h_from_nav(), and nav_init().
| struct EnuCoor_i nav_segment_start nav_segment_end |
Definition at line 119 of file navigation.c.
Referenced by nav_route(), and send_segment().
| bool nav_survey_active |
Definition at line 101 of file navigation.c.
Referenced by nav_periodic_task().
| uint32_t nav_throttle |
direct throttle from 0:MAX_PPRZ, used in VERTICAL_MODE_MANUAL
Definition at line 110 of file navigation.c.
Referenced by guidance_v_from_nav(), nav_heli_spinup_run(), nav_heli_spinup_setup(), and nav_init().
| struct EnuCoor_i navigation_carrot |
Definition at line 88 of file navigation.c.
Referenced by guidance_h_from_nav(), guidance_h_nav_enter(), nav_advance_carrot(), nav_init(), and nav_run().
| struct EnuCoor_i navigation_target |
Definition at line 87 of file navigation.c.
Referenced by guidance_h_from_nav(), mission_nav_wp(), nav_advance_carrot(), nav_circle(), nav_home(), nav_init(), nav_route(), nav_run(), nav_set_heading_towards_target(), nav_survey_poly_run(), nav_survey_rectangle_rotorcraft_setup(), NavGotoWaypoint(), and NavGotoWaypointHeading().
| enum oval_status oval_status |
Definition at line 622 of file navigation.c.
| bool too_far_from_home |
Definition at line 83 of file navigation.c.
Referenced by autopilot_static_on_rc_frame(), autopilot_static_periodic(), compute_dist2_to_home(), and nav_init().
Definition at line 92 of file navigation.c.
Referenced by dqrlss(), get_actuator_state(), qr_solve(), and wls_alloc().
| uint8_t vertical_mode |
Definition at line 109 of file navigation.c.
Referenced by nav_home(), and nav_init().
 1.8.8
1.8.8