|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
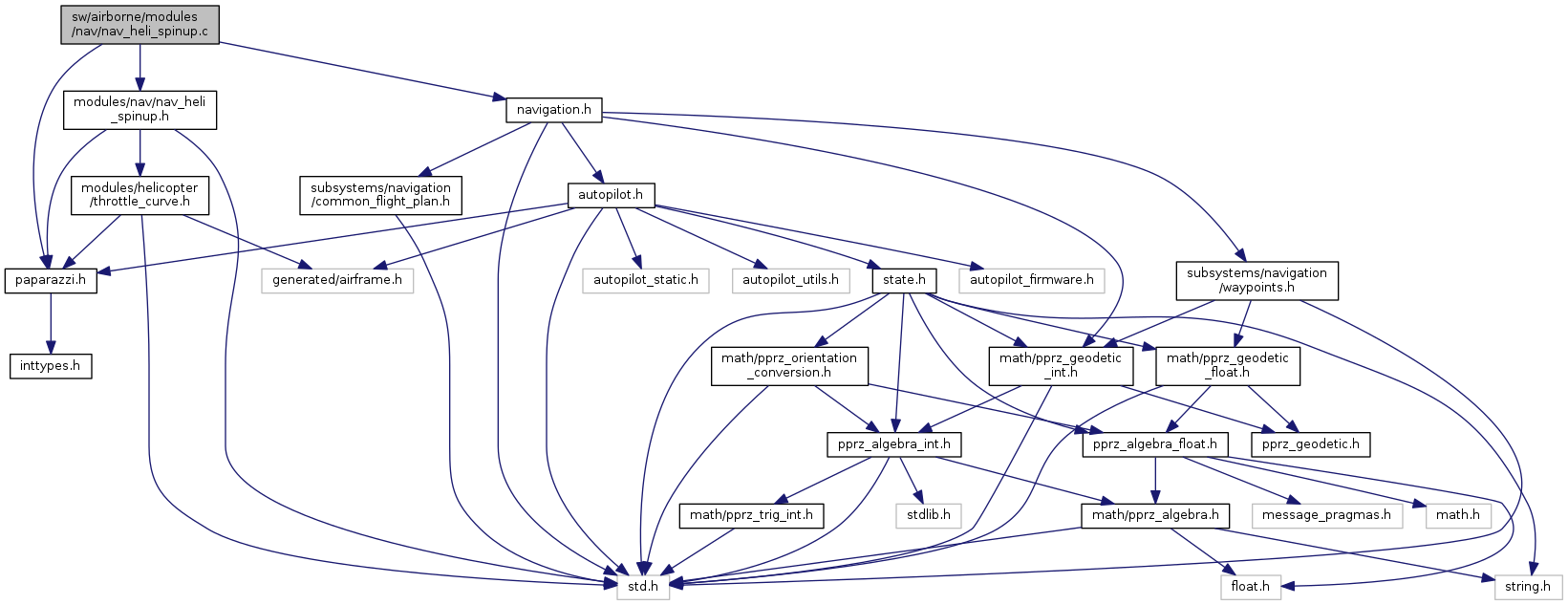
 Include dependency graph for nav_heli_spinup.c:
Include dependency graph for nav_heli_spinup.c:Go to the source code of this file.
Functions | |
| void | nav_heli_spinup_setup (uint16_t duration, float throttle) |
| Initialization function. More... | |
| bool | nav_heli_spinup_run (void) |
| Runs the heli spinup routine, with the parameters set by nav_heli_spinup_setup. More... | |
Variables | |
| static struct nav_heli_spinup_t | nav_heli_spinup |
Definition in file nav_heli_spinup.c.
| bool nav_heli_spinup_run | ( | void | ) |
Runs the heli spinup routine, with the parameters set by nav_heli_spinup_setup.
Heli spinup run function.
Definition at line 56 of file nav_heli_spinup.c.
References nav_heli_spinup_t::duration, horizontal_mode, HORIZONTAL_MODE_MANUAL, nav_cmd_pitch, nav_cmd_roll, nav_cmd_yaw, nav_heli_spinup, nav_throttle, stage_time, nav_heli_spinup_t::throttle, vertical_mode, and VERTICAL_MODE_MANUAL.
| void nav_heli_spinup_setup | ( | uint16_t | duration, |
| float | throttle | ||
| ) |
Initialization function.
| duration | duration over which the heli should spin up [s] |
| throttle | the final throttle at the end of the spinup |
Sets the heli spinup routine parameters and sets the horizontal and vertical modes to manual, with zero commands
Definition at line 39 of file nav_heli_spinup.c.
References nav_heli_spinup_t::duration, horizontal_mode, HORIZONTAL_MODE_MANUAL, MAX_PPRZ, nav_cmd_pitch, nav_cmd_roll, nav_cmd_yaw, nav_heli_spinup, nav_throttle, nav_heli_spinup_t::throttle, vertical_mode, and VERTICAL_MODE_MANUAL.
|
static |
Definition at line 30 of file nav_heli_spinup.c.
Referenced by nav_heli_spinup_run(), and nav_heli_spinup_setup().
 1.8.8
1.8.8