|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
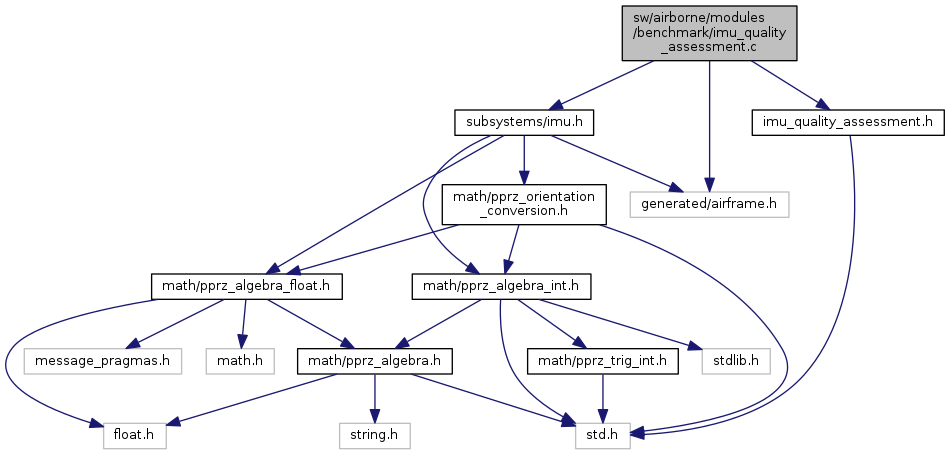
 Include dependency graph for imu_quality_assessment.c:
Include dependency graph for imu_quality_assessment.c:Go to the source code of this file.
Macros | |
| #define | IMU_QUALITY_ASSESSMENT_FILTER_ORDER 2 |
| #define | PEAK_TRACKER(_Value, _Peak) |
Functions | |
| void | imu_quality_assessment_init (void) |
| void | imu_quality_assessment_periodic (void) |
Variables | |
| struct imu_quality_assessment_data_struct | imu_quality_assessment_data |
| #define IMU_QUALITY_ASSESSMENT_FILTER_ORDER 2 |
Definition at line 35 of file imu_quality_assessment.c.
Referenced by imu_quality_assessment_periodic().
| #define PEAK_TRACKER | ( | _Value, | |
| _Peak | |||
| ) |
Definition at line 38 of file imu_quality_assessment.c.
Referenced by imu_quality_assessment_periodic().
| void imu_quality_assessment_init | ( | void | ) |
Definition at line 31 of file imu_quality_assessment.c.
| void imu_quality_assessment_periodic | ( | void | ) |
Definition at line 46 of file imu_quality_assessment.c.
References A, Imu::accel, Imu::accel_unscaled, B, imu, IMU_ACCEL_X_SENS_DEN, IMU_ACCEL_X_SENS_NUM, imu_quality_assessment_data, IMU_QUALITY_ASSESSMENT_FILTER_ORDER, PEAK_TRACKER, imu_quality_assessment_data_struct::q, imu_quality_assessment_data_struct::q_ax, imu_quality_assessment_data_struct::q_ay, imu_quality_assessment_data_struct::q_az, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
| struct imu_quality_assessment_data_struct imu_quality_assessment_data |
Definition at line 28 of file imu_quality_assessment.c.
Referenced by imu_quality_assessment_periodic().
 1.8.8
1.8.8