|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Find a IMAV pattern. More...
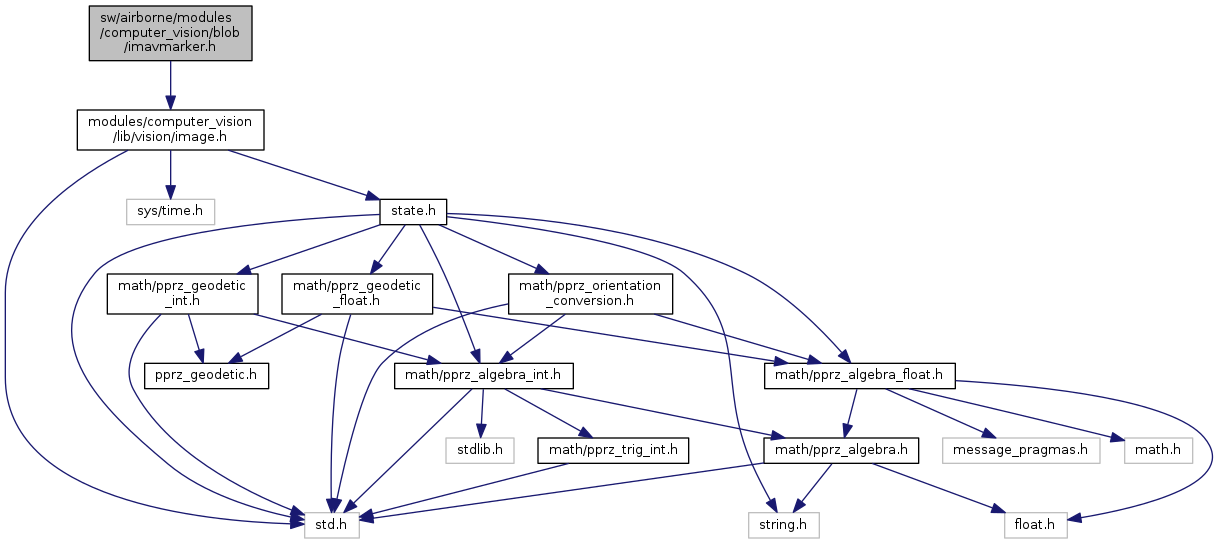
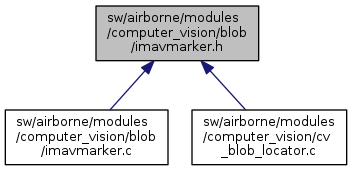
#include "modules/computer_vision/lib/vision/image.h" Include dependency graph for imavmarker.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for imavmarker.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | marker_deviation_t |
Functions | |
| struct marker_deviation_t | marker (struct image_t *input, uint8_t M) |
Find a IMAV pattern.
Definition in file imavmarker.h.
| struct marker_deviation_t |
Definition at line 32 of file imavmarker.h.
| Data Fields | ||
|---|---|---|
| uint16_t | inlier | |
| int32_t | x | |
| int32_t | y | |
| struct marker_deviation_t marker | ( | struct image_t * | input, |
| uint8_t | M | ||
| ) |
Definition at line 51 of file imavmarker.c.
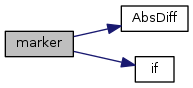
References AbsDiff(), if(), Img, marker_deviation_t::inlier, Out, marker_deviation_t::x, and marker_deviation_t::y.
Referenced by cv_marker_func().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8