|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Optical-flow based control for Linux based systems. More...
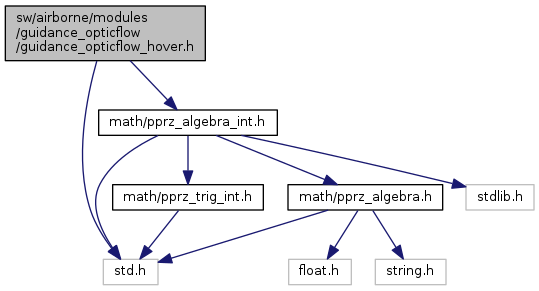
 Include dependency graph for guidance_opticflow_hover.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for guidance_opticflow_hover.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | opticflow_stab_t |
Functions | |
| void | guidance_h_module_init (void) |
| Initialization of horizontal guidance module. More... | |
| void | guidance_h_module_enter (void) |
| Horizontal guidance mode enter resets the errors and starts the controller. More... | |
| void | guidance_h_module_read_rc (void) |
| Read the RC commands. More... | |
| void | guidance_h_module_run (bool in_flight) |
| Main guidance loop. More... | |
Variables | |
| struct opticflow_stab_t | opticflow_stab |
Optical-flow based control for Linux based systems.
Control loops for optic flow based hovering. Computes setpoint for the lower level attitude stabilization to control horizontal velocity.
Definition in file guidance_opticflow_hover.h.
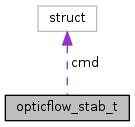
| struct opticflow_stab_t |
Definition at line 37 of file guidance_opticflow_hover.h.
Collaboration diagram for opticflow_stab_t:| Data Fields | ||
|---|---|---|
| struct Int32Eulers | cmd | The commands that are send to the hover loop. |
| float | desired_vx | The desired velocity in the x direction (cm/s) |
| float | desired_vy | The desired velocity in the y direction (cm/s) |
| float | err_vx_int | The integrated velocity error in x direction (m/s) |
| float | err_vy_int | The integrated velocity error in y direction (m/s) |
| int32_t | phi_igain | The roll I gain on the err_vx_int. |
| int32_t | phi_pgain | The roll P gain on the err_vx. |
| int32_t | theta_igain | The pitch I gain on the err_vy_int. |
| int32_t | theta_pgain | The pitch P gain on the err_vy. |
| void guidance_h_module_enter | ( | void | ) |
Horizontal guidance mode enter resets the errors and starts the controller.
Definition at line 85 of file ctrl_module_demo.c.
| void guidance_h_module_init | ( | void | ) |
Initialization of horizontal guidance module.
Definition at line 80 of file ctrl_module_demo.c.
| void guidance_h_module_read_rc | ( | void | ) |
Read the RC commands.
Definition at line 90 of file ctrl_module_demo.c.
| void guidance_h_module_run | ( | bool | in_flight | ) |
Main guidance loop.
| [in] | in_flight | Whether we are in flight or not |
Definition at line 99 of file ctrl_module_demo.c.
| struct opticflow_stab_t opticflow_stab |
Definition at line 90 of file guidance_opticflow_hover.c.
 1.8.8
1.8.8