|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Fixedwing specific autopilot interface and initialization. More...
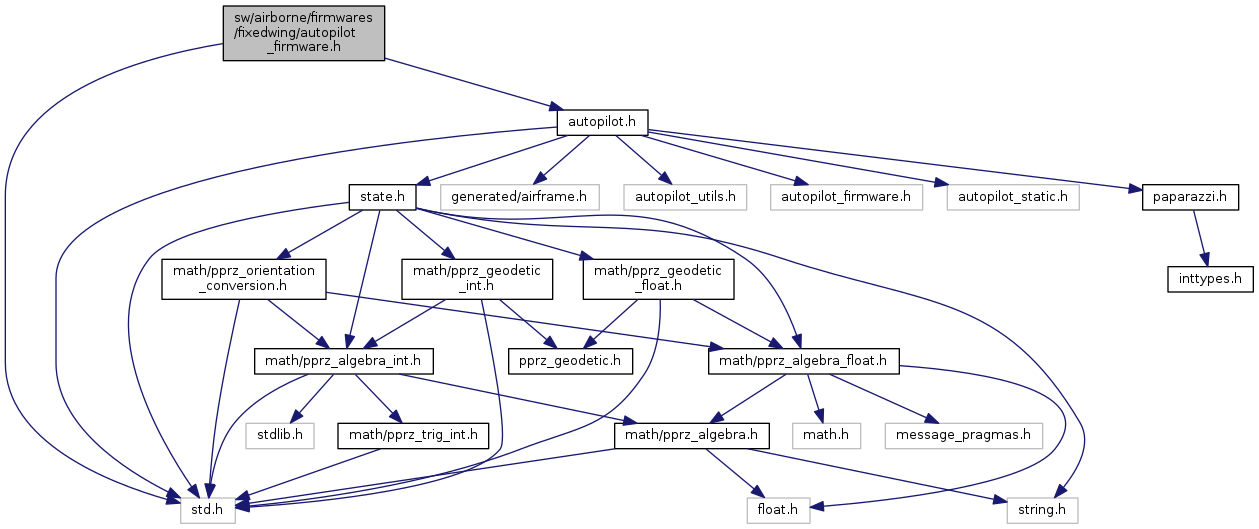
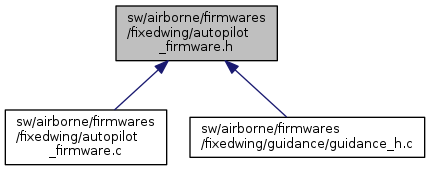
 Include dependency graph for autopilot_firmware.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for autopilot_firmware.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | LATERAL_MODE_MANUAL 0 |
| #define | LATERAL_MODE_ROLL_RATE 1 |
| #define | LATERAL_MODE_ROLL 2 |
| #define | LATERAL_MODE_COURSE 3 |
| #define | LATERAL_MODE_NB 4 |
Functions | |
| void | autopilot_firmware_init (void) |
| Init function. More... | |
Variables | |
| uint8_t | lateral_mode |
| uint16_t | vsupply |
| Supply voltage in deciVolt. More... | |
| int32_t | current |
| Supply current in milliAmpere. More... | |
| float | energy |
| Energy consumption (mAh) This is the ap copy of the measurement from fbw FIXME use electrical module ? More... | |
| uint8_t | mcu1_status |
| Second MCU status (FBW part) More... | |
Fixedwing specific autopilot interface and initialization.
Definition in file autopilot_firmware.h.
| #define LATERAL_MODE_COURSE 3 |
Definition at line 38 of file autopilot_firmware.h.
Referenced by fly_to_xy(), h_ctl_guidance_loop(), and navigation_task().
| #define LATERAL_MODE_MANUAL 0 |
Definition at line 35 of file autopilot_firmware.h.
Referenced by autopilot_static_init().
| #define LATERAL_MODE_NB 4 |
Definition at line 39 of file autopilot_firmware.h.
| #define LATERAL_MODE_ROLL 2 |
Definition at line 37 of file autopilot_firmware.h.
Referenced by fly_to_xy(), gvf_control_2D(), nav_without_gps(), and v_ctl_landing_loop().
| #define LATERAL_MODE_ROLL_RATE 1 |
Definition at line 36 of file autopilot_firmware.h.
| void autopilot_firmware_init | ( | void | ) |
Init function.
Definition at line 133 of file autopilot_firmware.c.
| int32_t current |
Supply current in milliAmpere.
This the ap copy of the measurement from fbw FIXME use electrical module ?
Definition at line 36 of file autopilot_firmware.c.
Referenced by autopilot_firmware_init(), autopilot_generated_on_rc_frame(), autopilot_static_on_rc_frame(), send_bat(), and send_energy().
| float energy |
Energy consumption (mAh) This is the ap copy of the measurement from fbw FIXME use electrical module ?
Definition at line 37 of file autopilot_firmware.c.
Referenced by autopilot_firmware_init(), autopilot_generated_on_rc_frame(), autopilot_static_on_rc_frame(), generic_com_periodic(), send_bat(), and send_energy().
| uint8_t lateral_mode |
Definition at line 39 of file autopilot_firmware.c.
Referenced by autopilot_static_init(), fly_to_xy(), gvf_control_2D(), h_ctl_guidance_loop(), nav_without_gps(), navigation_task(), send_mode(), and v_ctl_landing_loop().
| uint8_t mcu1_status |
Second MCU status (FBW part)
Definition at line 40 of file autopilot_firmware.c.
Referenced by mcu1_status_update(), and send_mode().
| uint16_t vsupply |
Supply voltage in deciVolt.
This the ap copy of the measurement from fbw FIXME use electrical module ?
Definition at line 35 of file autopilot_firmware.c.
Referenced by attitude_loop(), autopilot_firmware_init(), autopilot_generated_on_rc_frame(), autopilot_static_on_rc_frame(), gsm_send_report_continue(), monitor_task(), send_bat(), send_energy(), and v_ctl_guidance_loop().
 1.8.8
1.8.8