|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
Navigation functions for cartography of the ground. More...
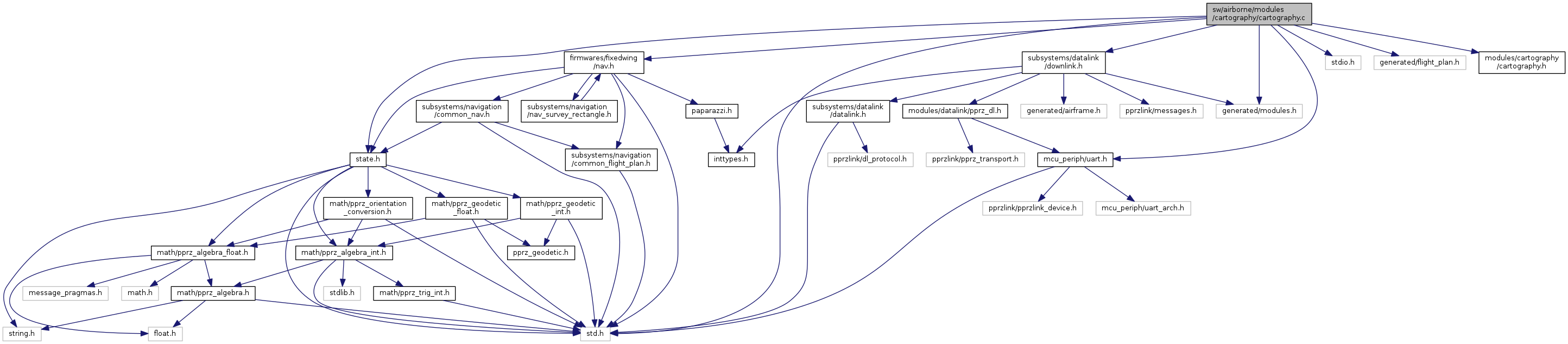
#include "state.h"#include "stdio.h"#include "firmwares/fixedwing/nav.h"#include "generated/flight_plan.h"#include "std.h"#include "modules/cartography/cartography.h"#include "generated/modules.h"#include "subsystems/datalink/downlink.h"#include "mcu_periph/uart.h" Include dependency graph for cartography.c:
Include dependency graph for cartography.c:Go to the source code of this file.
Macros | |
| #define | PRTDEB(TYPE, EXP) ; |
| #define | PRTDEBSTR(EXP) ; |
| #define | DISTXY(P1X, P1Y, P2X, P2Y) (sqrt( ( (P2X-P1X) * (P2X-P1X) ) + ( (P2Y-P1Y) * (P2Y-P1Y) ) ) ) |
| #define | NORMXY(P1X, P1Y) (sqrt( ( (P1X) * (P1X) ) + ( (P1Y) * (P1Y) ) ) ) |
| #define | DISTLIMIT 30 |
| #define | USE_ONBOARD_CAMERA 1 |
Functions | |
| void | init_carto (void) |
| Automatic survey of an oriented rectangle (defined by three points) More... | |
| void | periodic_downlink_carto (void) |
| void | start_carto (void) |
| void | stop_carto (void) |
| bool | nav_survey_Inc_railnumberSinceBoot (void) |
| bool | nav_survey_Snapshoot (void) |
| bool | nav_survey_Snapshoot_Continu (void) |
| bool | nav_survey_StopSnapshoot (void) |
| bool | nav_survey_computefourth_corner (uint8_t wp1, uint8_t wp2, uint8_t wp3, uint8_t wp4) |
| bool | nav_survey_ComputeProjectionOnLine (struct point pointAf, struct point pointBf, float pos_xf, float pos_yf, float *normAMf, float *normBMf, float *distancefromrailf) |
| bool | nav_survey_losange_carto_init (uint8_t wp1, uint8_t wp2, uint8_t wp3, float distrailinit, float distplusinit) |
| bool | nav_survey_losange_carto (void) |
Variables | |
| uint16_t | railnumberSinceBoot |
| uint16_t | camera_snapshot_image_number = 0 |
| bool | survey_losange_uturn |
| int | railnumber |
| int | numberofrailtodo |
| float | distrail |
| float | distplus |
| float | distrailinteractif |
| static struct point point1 point2 | point3 |
| static struct point pointA pointB | pointC |
| static struct point vec12 | vec13 |
| float | norm12 |
| float | norm13 |
| float | tempx |
| float | tempy |
| float | angle1213 |
| float | signforturn |
| float | tempcircleradius |
| float | circleradiusmin = 40 |
| float | normBM |
| float | normAM |
| float | distancefromrail |
| float | course_next_rail |
| float | angle_between |
| bool | ProjectionInsideLimitOfRail |
Navigation functions for cartography of the ground.
Definition in file cartography.c.
| #define DISTLIMIT 30 |
Definition at line 80 of file cartography.c.
Referenced by nav_survey_losange_carto().
| #define DISTXY | ( | P1X, | |
| P1Y, | |||
| P2X, | |||
| P2Y | |||
| ) | (sqrt( ( (P2X-P1X) * (P2X-P1X) ) + ( (P2Y-P1Y) * (P2Y-P1Y) ) ) ) |
Definition at line 71 of file cartography.c.
Referenced by nav_survey_ComputeProjectionOnLine(), and nav_survey_losange_carto().
| #define NORMXY | ( | P1X, | |
| P1Y | |||
| ) | (sqrt( ( (P1X) * (P1X) ) + ( (P1Y) * (P1Y) ) ) ) |
Definition at line 74 of file cartography.c.
Referenced by nav_survey_ComputeProjectionOnLine(), and nav_survey_losange_carto_init().
| #define PRTDEB | ( | TYPE, | |
| EXP | |||
| ) | ; |
Definition at line 54 of file cartography.c.
Referenced by nav_survey_computefourth_corner(), nav_survey_ComputeProjectionOnLine(), nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| #define PRTDEBSTR | ( | EXP | ) | ; |
Definition at line 57 of file cartography.c.
Referenced by nav_survey_computefourth_corner(), nav_survey_ComputeProjectionOnLine(), nav_survey_losange_carto(), nav_survey_Snapshoot(), nav_survey_Snapshoot_Continu(), and nav_survey_StopSnapshoot().
| #define USE_ONBOARD_CAMERA 1 |
Definition at line 89 of file cartography.c.
| void init_carto | ( | void | ) |
Automatic survey of an oriented rectangle (defined by three points)
Definition at line 148 of file cartography.c.
Definition at line 211 of file cartography.c.
References nav_survey_computefourth_corner(), PRTDEB, PRTDEBSTR, waypoints, point::x, and point::y.
Referenced by nav_survey_computefourth_corner().
Here is the call graph for this function: Here is the caller graph for this function:| bool nav_survey_ComputeProjectionOnLine | ( | struct point | pointAf, |
| struct point | pointBf, | ||
| float | pos_xf, | ||
| float | pos_yf, | ||
| float * | normAMf, | ||
| float * | normBMf, | ||
| float * | distancefromrailf | ||
| ) |
Definition at line 227 of file cartography.c.
References point::a, DISTXY, NORMXY, PRTDEB, PRTDEBSTR, point::x, and point::y.
Referenced by nav_survey_losange_carto().
Here is the caller graph for this function:| bool nav_survey_Inc_railnumberSinceBoot | ( | void | ) |
Definition at line 177 of file cartography.c.
References railnumberSinceBoot.
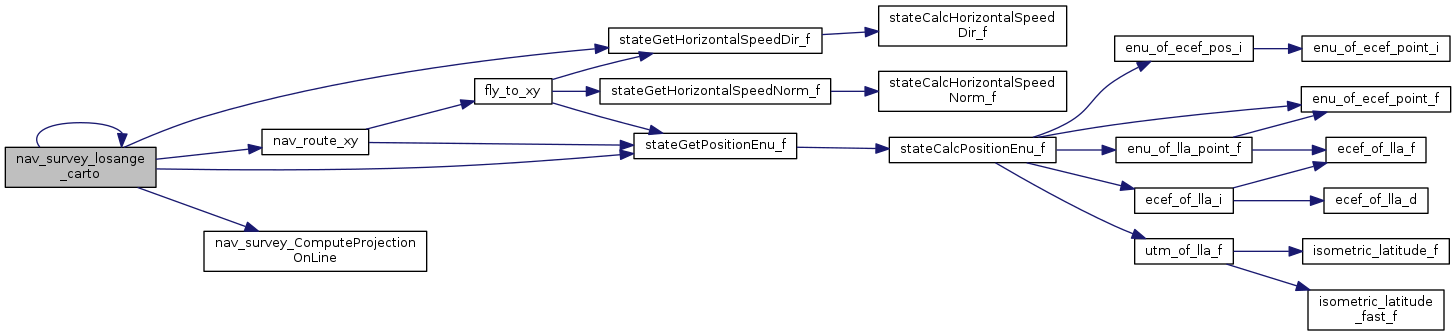
| bool nav_survey_losange_carto | ( | void | ) |
Definition at line 423 of file cartography.c.
References angle_between, camera_snapshot_image_number, circleradiusmin, course_next_rail, distancefromrail, DISTLIMIT, distplus, distrail, DISTXY, FALSE, nav_route_xy(), nav_survey_ComputeProjectionOnLine(), nav_survey_losange_carto(), NavCircleWaypoint, norm12, norm13, normAM, normBM, numberofrailtodo, pointC, ProjectionInsideLimitOfRail, PRTDEB, PRTDEBSTR, railnumber, railnumberSinceBoot, signforturn, stateGetHorizontalSpeedDir_f(), stateGetPositionEnu_f(), survey_losange_uturn, tempcircleradius, tempx, tempy, UTURN, vec13, waypoints, point::x, and point::y.
Referenced by nav_survey_losange_carto().
Here is the call graph for this function: Here is the caller graph for this function:| bool nav_survey_losange_carto_init | ( | uint8_t | wp1, |
| uint8_t | wp2, | ||
| uint8_t | wp3, | ||
| float | distrailinit, | ||
| float | distplusinit | ||
| ) |
Definition at line 322 of file cartography.c.
References angle1213, distplus, distrail, norm12, norm13, NORMXY, numberofrailtodo, point3, PRTDEB, railnumber, railnumberSinceBoot, signforturn, survey_losange_uturn, vec13, waypoints, point::x, and point::y.
| bool nav_survey_Snapshoot | ( | void | ) |
Definition at line 183 of file cartography.c.
References camera_snapshot_image_number, PRTDEBSTR, and railnumberSinceBoot.
| bool nav_survey_Snapshoot_Continu | ( | void | ) |
Definition at line 192 of file cartography.c.
References camera_snapshot_image_number, PRTDEBSTR, and railnumberSinceBoot.
| bool nav_survey_StopSnapshoot | ( | void | ) |
Definition at line 201 of file cartography.c.
References camera_snapshot_image_number, PRTDEBSTR, and STOP.
| void periodic_downlink_carto | ( | void | ) |
Definition at line 152 of file cartography.c.
References camera_snapshot_image_number, DefaultChannel, and DefaultDevice.
| void start_carto | ( | void | ) |
Definition at line 166 of file cartography.c.
| void stop_carto | ( | void | ) |
Definition at line 170 of file cartography.c.
| float angle1213 |
Definition at line 120 of file cartography.c.
Referenced by nav_survey_losange_carto_init().
| float angle_between |
Definition at line 131 of file cartography.c.
Referenced by nav_survey_losange_carto().
| uint16_t camera_snapshot_image_number = 0 |
Definition at line 92 of file cartography.c.
Referenced by nav_survey_losange_carto(), nav_survey_Snapshoot(), nav_survey_Snapshoot_Continu(), nav_survey_StopSnapshoot(), and periodic_downlink_carto().
| float circleradiusmin = 40 |
Definition at line 124 of file cartography.c.
Referenced by nav_survey_losange_carto().
| float course_next_rail |
Definition at line 130 of file cartography.c.
Referenced by nav_survey_losange_carto().
| float distancefromrail |
Definition at line 127 of file cartography.c.
Referenced by nav_survey_losange_carto().
| float distplus |
Definition at line 105 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| float distrail |
Definition at line 104 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| float distrailinteractif |
Definition at line 107 of file cartography.c.
| float norm12 |
Definition at line 114 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| float norm13 |
Definition at line 114 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| float normAM |
Definition at line 127 of file cartography.c.
Referenced by nav_survey_losange_carto().
| float normBM |
Definition at line 127 of file cartography.c.
Referenced by nav_survey_losange_carto().
| int numberofrailtodo |
Definition at line 102 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
|
static |
Definition at line 111 of file cartography.c.
Referenced by nav_survey_losange_carto_init().
|
static |
Definition at line 112 of file cartography.c.
Referenced by nav_survey_losange_carto().
| bool ProjectionInsideLimitOfRail |
Definition at line 133 of file cartography.c.
Referenced by nav_survey_losange_carto().
| int railnumber |
Definition at line 101 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| uint16_t railnumberSinceBoot |
Definition at line 84 of file cartography.c.
Referenced by nav_survey_Inc_railnumberSinceBoot(), nav_survey_losange_carto(), nav_survey_losange_carto_init(), nav_survey_Snapshoot(), and nav_survey_Snapshoot_Continu().
| float signforturn |
Definition at line 121 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| bool survey_losange_uturn |
Definition at line 99 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
| float tempcircleradius |
Definition at line 123 of file cartography.c.
Referenced by nav_survey_losange_carto().
| float tempx |
Definition at line 119 of file cartography.c.
Referenced by nav_survey_losange_carto().
| float tempy |
Definition at line 119 of file cartography.c.
Referenced by nav_survey_losange_carto().
|
static |
Definition at line 113 of file cartography.c.
Referenced by nav_survey_losange_carto(), and nav_survey_losange_carto_init().
 1.8.8
1.8.8