|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
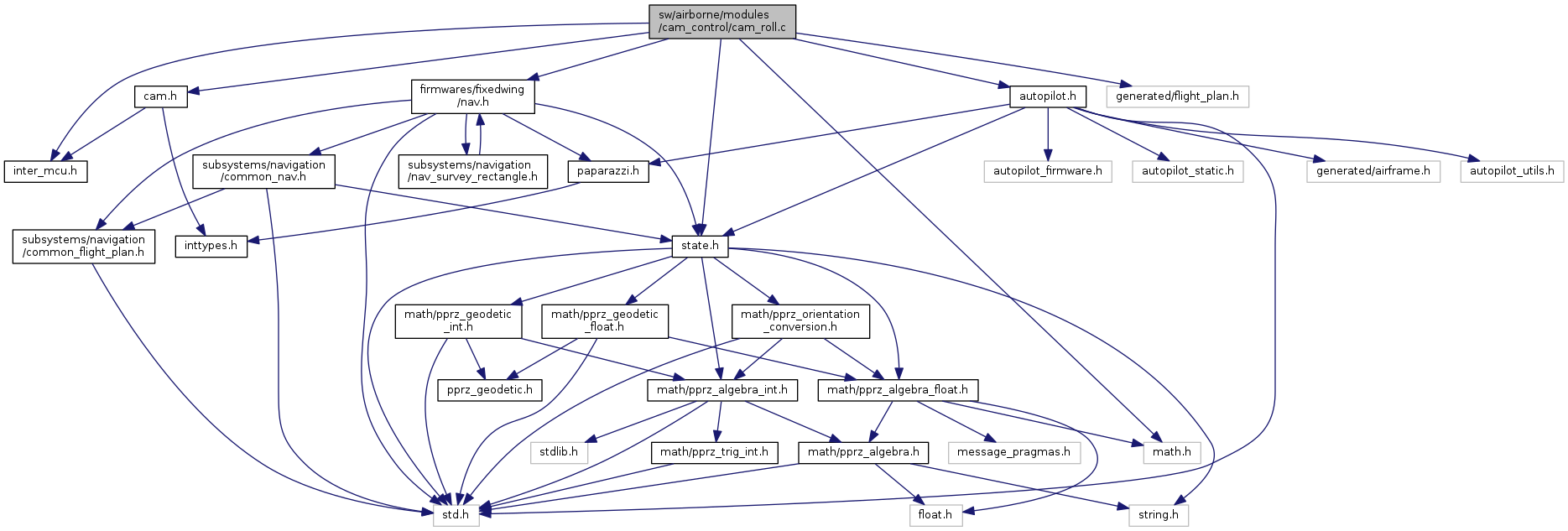
#include <math.h>#include "cam.h"#include "firmwares/fixedwing/nav.h"#include "autopilot.h"#include "generated/flight_plan.h"#include "state.h"#include "inter_mcu.h" Include dependency graph for cam_roll.c:
Include dependency graph for cam_roll.c:Go to the source code of this file.
Macros | |
| #define | CAM_PHI_MAX RadOfDeg(45) |
Variables | |
| float | cam_roll_phi |
| float | phi_c |
| float | theta_c |
| float | target_x |
| float | target_y |
| float | target_alt |
| #define CAM_PHI_MAX RadOfDeg(45) |
Definition at line 37 of file cam_roll.c.
| float cam_roll_phi |
Definition at line 40 of file cam_roll.c.
| float phi_c |
Definition at line 41 of file cam_roll.c.
| float target_alt |
Definition at line 44 of file cam_roll.c.
| float target_x |
Definition at line 44 of file cam_roll.c.
| float target_y |
Definition at line 44 of file cam_roll.c.
| float theta_c |
Definition at line 42 of file cam_roll.c.
 1.8.8
1.8.8