|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
#include <std.h> Include dependency graph for avoid_navigation.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for avoid_navigation.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | AvoidNavigationStruct |
Macros | |
| #define | NAV_LINE_AVOID_SEGMENT_LENGTH 2.0 |
Functions | |
| void | init_avoid_navigation (void) |
| void | run_avoid_navigation_onvision (void) |
| void | increase_nav_heading (int32_t *heading, int32_t increment) |
| Increases the NAV heading. More... | |
Variables | |
| struct AvoidNavigationStruct | avoid_navigation_data |
| global VIDEO state More... | |
| bool | obstacle_detected |
Definition in file avoid_navigation.h.
| struct AvoidNavigationStruct |
Definition at line 69 of file stereocam_droplet.c.
| Data Fields | ||
|---|---|---|
| uint8_t | mode |
0 = straight, 1 = right, 2 = left, ... 0 = nothing, 1 = climb, 2 = sideways, ... |
| uint8_t | stereo_bin[8] | |
| uint8_t | timeout | |
| #define NAV_LINE_AVOID_SEGMENT_LENGTH 2.0 |
Definition at line 38 of file avoid_navigation.h.
Referenced by run_avoid_navigation_onvision().
Increases the NAV heading.
Assumes heading is an INT32_ANGLE. It is bound in this function.
Definition at line 51 of file orange_avoider.c.
References INT32_ANGLE_NORMALIZE.
| void init_avoid_navigation | ( | void | ) |
Definition at line 58 of file avoid_navigation.c.
References avoid_navigation_data, and AvoidNavigationStruct::mode.
Referenced by stereo_avoid_init().
Here is the caller graph for this function:| void run_avoid_navigation_onvision | ( | void | ) |
Definition at line 65 of file avoid_navigation.c.
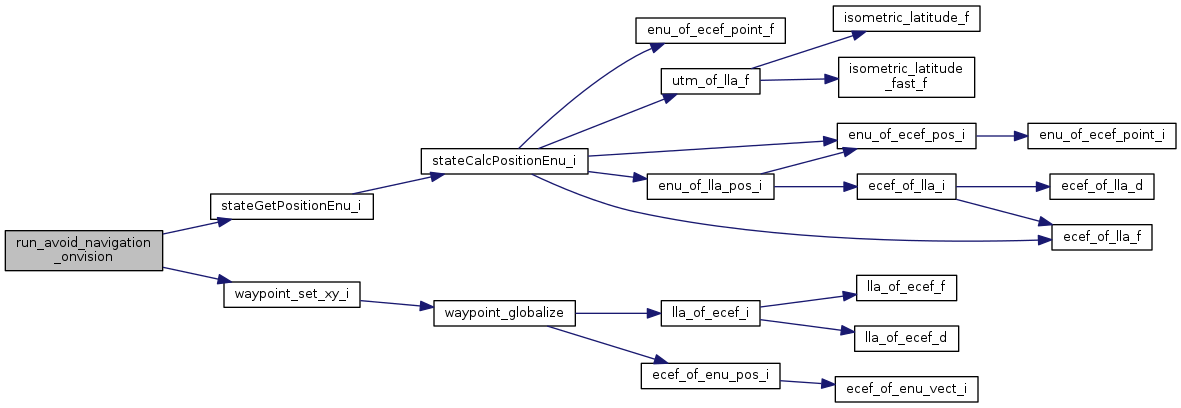
References ANGLE_FLOAT_OF_BFP, avoid_navigation_data, counter, DefaultChannel, DefaultDevice, AvoidNavigationStruct::mode, nav_heading, NAV_LINE_AVOID_SEGMENT_LENGTH, obstacle_detected, POS_BFP_OF_REAL, stateGetPositionEnu_i(), AvoidNavigationStruct::stereo_bin, waypoint_set_xy_i(), EnuCoor_i::x, EnuCoor_i::y, and EnuCoor_i::z.
Referenced by stereo_avoid_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct AvoidNavigationStruct avoid_navigation_data |
global VIDEO state
Definition at line 75 of file stereocam_droplet.c.
Referenced by init_avoid_navigation(), run_avoid_navigation_onvision(), stereo_avoid_init(), stereo_avoid_run(), stereo_parse(), stereocam_droplet_init(), and stereocam_droplet_periodic().
| bool obstacle_detected |
Definition at line 54 of file avoid_navigation.c.
Referenced by run_avoid_navigation_onvision(), and stereocam_droplet_periodic().
 1.8.8
1.8.8