|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
Paparazzi fixed point trig functions. More...
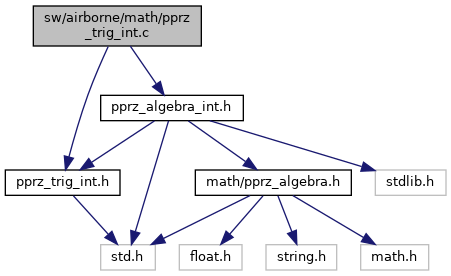
 Include dependency graph for pprz_trig_int.c:
Include dependency graph for pprz_trig_int.c:Go to the source code of this file.
Macros | |
| #define | R_FRAC 14 |
Functions | |
| int32_t | pprz_itrig_sin (int32_t angle) |
| int32_t | pprz_itrig_cos (int32_t angle) |
| int32_t | int32_atan2 (int32_t y, int32_t x) |
| int32_t | int32_atan2_2 (int32_t y, int32_t x) |
Variables | |
| PPRZ_TRIG_CONST int16_t | pprz_trig_int [6434] |
Paparazzi fixed point trig functions.
Definition in file pprz_trig_int.c.
| #define R_FRAC 14 |
Definition at line 897 of file pprz_trig_int.c.
Definition at line 899 of file pprz_trig_int.c.
References c1, c2, INT32_ANGLE_PI_4, and R_FRAC.
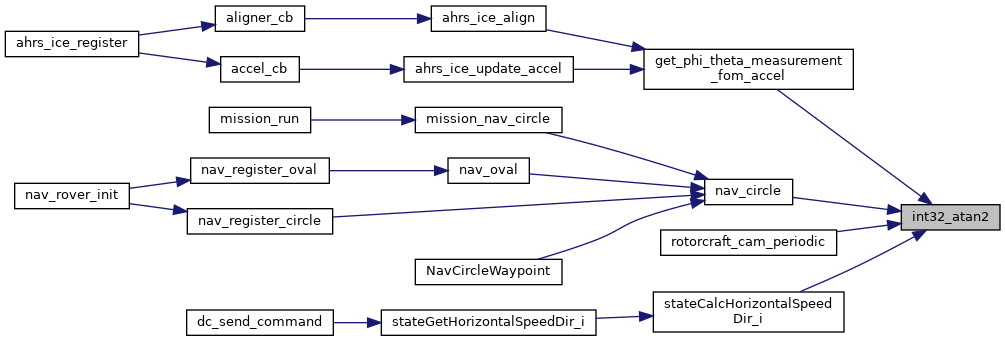
Referenced by get_phi_theta_measurement_fom_accel(), nav_circle(), rotorcraft_cam_periodic(), and stateCalcHorizontalSpeedDir_i().
Here is the caller graph for this function:Definition at line 921 of file pprz_trig_int.c.
References ANGLE_BFP_OF_REAL, c1, c2, INT32_ANGLE_FRAC, INT32_ANGLE_PI_4, and R_FRAC.
Referenced by nav_oval().
Here is the caller graph for this function:Definition at line 888 of file pprz_trig_int.c.
References INT32_ANGLE_PI_2, and pprz_itrig_sin().
Referenced by stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 859 of file pprz_trig_int.c.
References ANGLE_BFP_OF_REAL, ANGLE_FLOAT_OF_BFP, INT32_ANGLE_NORMALIZE, INT32_ANGLE_PI, INT32_ANGLE_PI_2, and pprz_trig_int.
Referenced by pprz_itrig_cos(), and stabilization_attitude_run().
Here is the caller graph for this function:| PPRZ_TRIG_CONST int16_t pprz_trig_int[6434] |
Definition at line 31 of file pprz_trig_int.c.
Referenced by pprz_itrig_sin().
 1.8.17
1.8.17