|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | vPoint (float fPlaneEast, float fPlaneNorth, float fPlaneAltitude, float fRollAngle, float fPitchAngle, float fYawAngle, float fObjectEast, float fObjectNorth, float fAltitude, float *fPan, float *fTilt) |
| void vPoint | ( | float | fPlaneEast, |
| float | fPlaneNorth, | ||
| float | fPlaneAltitude, | ||
| float | fRollAngle, | ||
| float | fPitchAngle, | ||
| float | fYawAngle, | ||
| float | fObjectEast, | ||
| float | fObjectNorth, | ||
| float | fAltitude, | ||
| float * | fPan, | ||
| float * | fTilt | ||
| ) |
Definition at line 164 of file point.c.
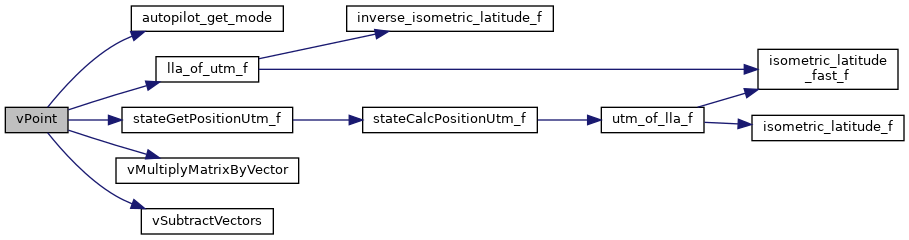
References point::a, AP_MODE_AUTO2, autopilot_get_mode(), cam_lock, cam_mode, CAM_MODE_RC, CAM_MODE_STABILIZED, CAM_MODE_WP_TARGET, CAM_MODE_XY_TARGET, CAM_PAN_MAX, CAM_PAN_MIN, cam_phi, cam_theta, CAM_TILT_MAX, CAM_TILT_MIN, UtmCoor_f::east, FALSE, fbw_state, VECTOR::fx, MATRIX::fx1, MATRIX::fx2, MATRIX::fx3, VECTOR::fy, MATRIX::fy1, MATRIX::fy2, MATRIX::fy3, VECTOR::fz, MATRIX::fz1, MATRIX::fz2, MATRIX::fz3, ground_alt, LlaCoor_f::lat, lla_of_utm_f(), LlaCoor_f::lon, MAX_PPRZ, memory_x, memory_y, memory_z, MIN_PPRZ, nav_utm_east0, nav_utm_north0, nav_utm_zone0, UtmCoor_f::north, PPRZ_MUTEX_LOCK, PPRZ_MUTEX_UNLOCK, RADIO_PITCH, RADIO_ROLL, stateGetPositionUtm_f(), vMultiplyMatrixByVector(), vSubtractVectors(), waypoints, point::x, point::y, and UtmCoor_f::zone.
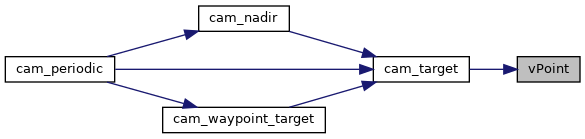
Referenced by cam_target().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17