|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
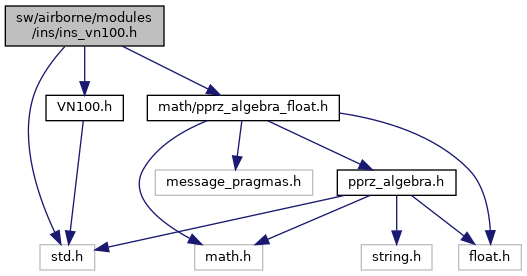
Interface for the VectorNav VN100 AHRS use the binary protocal on the SPI link. More...
 Include dependency graph for ins_vn100.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins_vn100.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | VN100_ADOR VN100_ADOR_OFF |
| #define | VN100_ADOF VN100_ADOF_5HZ |
| #define | VN100_BAUD VN100_Baud_57600 |
| #define | INS_VN100_SET_BAUD 0 |
| #define | INS_VN100_SET_ADOR 1 |
| #define | INS_VN100_SET_ADOF 2 |
| #define | INS_VN100_READY 3 |
| #define | PERIODIC_SEND_AHRS(_chan, _dev) |
Functions | |
| void | vn100_init (void) |
| void | vn100_periodic_task (void) |
| void | vn100_event_task (void) |
| void | vn100_report_task (void) |
Variables | |
| float | ins_roll_neutral |
| float | ins_pitch_neutral |
| float | ins_yaw_neutral |
| struct FloatEulers | ins_eulers |
| struct FloatQuat | ins_quat |
| struct FloatRates | ins_rates |
| struct FloatRMat | ins_rmat |
| struct FloatVect3 | ins_accel |
| struct FloatVect3 | ins_mag |
| volatile uint8_t | ins_msg_received |
| VN100_Res_Packet | last_received_packet |
| VN100_Req_Packet | last_send_packet |
| uint32_t | ins_ador |
| uint32_t | ins_adof |
| uint32_t | ins_baud |
| uint8_t | ins_init_status |
Interface for the VectorNav VN100 AHRS use the binary protocal on the SPI link.
Definition in file ins_vn100.h.
| #define INS_VN100_READY 3 |
Definition at line 81 of file ins_vn100.h.
| #define INS_VN100_SET_ADOF 2 |
Definition at line 80 of file ins_vn100.h.
| #define INS_VN100_SET_ADOR 1 |
Definition at line 79 of file ins_vn100.h.
| #define INS_VN100_SET_BAUD 0 |
Definition at line 78 of file ins_vn100.h.
| #define PERIODIC_SEND_AHRS | ( | _chan, | |
| _dev | |||
| ) |
Definition at line 84 of file ins_vn100.h.
| #define VN100_ADOF VN100_ADOF_5HZ |
Definition at line 70 of file ins_vn100.h.
| #define VN100_ADOR VN100_ADOR_OFF |
Definition at line 67 of file ins_vn100.h.
| #define VN100_BAUD VN100_Baud_57600 |
Definition at line 73 of file ins_vn100.h.
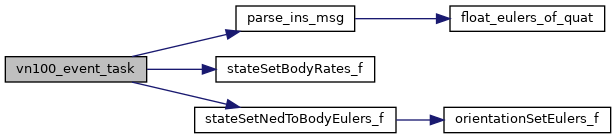
| void vn100_event_task | ( | void | ) |
Definition at line 160 of file ins_vn100.c.
References ins_eulers, ins_pitch_neutral, ins_rates, ins_roll_neutral, parse_ins_msg(), FloatEulers::phi, FloatEulers::psi, SPITransDone, SPITransFailed, SPITransSuccess, stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), spi_transaction::status, FloatEulers::theta, and vn100_trans.
Here is the call graph for this function:| void vn100_init | ( | void | ) |
Definition at line 85 of file ins_vn100.c.
References spi_transaction::cpha, spi_transaction::cpol, spi_transaction::dss, spi_transaction::input_buf, ins_adof, ins_ador, ins_baud, ins_init_status, INS_VN100_SET_BAUD, ins_yaw_neutral, INS_YAW_NEUTRAL_DEFAULT, last_received_packet, last_send_packet, spi_transaction::output_buf, spi_transaction::select, spi_transaction::slave_idx, SPICphaEdge2, SPICpolIdleHigh, SPIDss8bit, SPISelectUnselect, SPITransDone, spi_transaction::status, VN100_ADOF, VN100_ADOR, VN100_BAUD, VN100_SLAVE_IDX, and vn100_trans.
| void vn100_periodic_task | ( | void | ) |
Definition at line 140 of file ins_vn100.c.
References VN100_Req_Packet::CmdID, spi_transaction::input_length, ins_configure(), last_send_packet, spi_transaction::output_length, VN100_Req_Packet::RegID, spi_submit(), SPITransDone, spi_transaction::status, TRUE, VN100_CmdID_ReadRegister, VN100_REG_YMR, VN100_REG_YMR_SIZE, VN100_SPI_DEV, and vn100_trans.
Here is the call graph for this function:| void vn100_report_task | ( | void | ) |
Definition at line 311 of file ins_vn100.c.
References DefaultChannel, DefaultDevice, ins_accel, ins_eulers, ins_mag, ins_quat, ins_rates, FloatRates::p, FloatEulers::phi, FloatEulers::psi, FloatRates::q, FloatQuat::qi, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatRates::r, FloatEulers::theta, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
| struct FloatVect3 ins_accel |
Definition at line 61 of file ins_vn100.c.
Referenced by parse_ins_msg(), and vn100_report_task().
| uint32_t ins_adof |
Definition at line 73 of file ins_vn100.c.
Referenced by parse_ins_msg(), and vn100_init().
| uint32_t ins_ador |
Definition at line 72 of file ins_vn100.c.
Referenced by parse_ins_msg(), and vn100_init().
| uint32_t ins_baud |
Definition at line 74 of file ins_vn100.c.
Referenced by parse_ins_msg(), and vn100_init().
| struct FloatEulers ins_eulers |
Definition at line 57 of file ins_vn100.c.
Referenced by parse_ins_msg(), vn100_event_task(), and vn100_report_task().
| uint8_t ins_init_status |
Definition at line 76 of file ins_vn100.c.
Referenced by ins_configure(), and vn100_init().
| struct FloatVect3 ins_mag |
Definition at line 62 of file ins_vn100.c.
Referenced by parse_ins_msg(), and vn100_report_task().
| volatile uint8_t ins_msg_received |
Definition at line 64 of file ins_vn100.c.
| float ins_pitch_neutral |
Definition at line 15 of file ins_arduimu.c.
| struct FloatQuat ins_quat |
Definition at line 58 of file ins_vn100.c.
Referenced by parse_ins_msg(), and vn100_report_task().
| struct FloatRates ins_rates |
Definition at line 59 of file ins_vn100.c.
Referenced by parse_ins_msg(), vn100_event_task(), and vn100_report_task().
| struct FloatRMat ins_rmat |
Definition at line 60 of file ins_vn100.c.
| float ins_roll_neutral |
Definition at line 14 of file ins_arduimu.c.
| float ins_yaw_neutral |
Definition at line 55 of file ins_vn100.c.
Referenced by vn100_init().
| VN100_Res_Packet last_received_packet |
Definition at line 67 of file ins_vn100.c.
Referenced by parse_ins_msg(), and vn100_init().
| VN100_Req_Packet last_send_packet |
Definition at line 69 of file ins_vn100.c.
Referenced by ins_configure(), vn100_init(), and vn100_periodic_task().
 1.8.17
1.8.17