|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
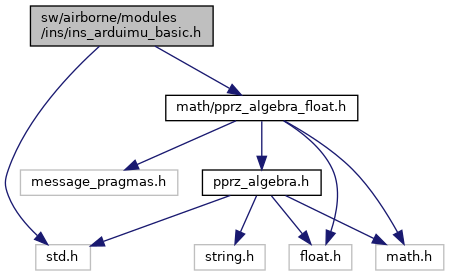
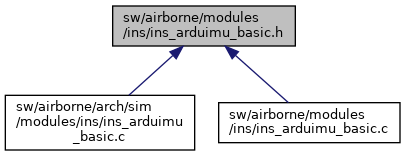
 Include dependency graph for ins_arduimu_basic.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins_arduimu_basic.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | ArduIMU_init (void) |
| void | ArduIMU_periodic (void) |
| void | ArduIMU_periodicGPS (void) |
| void | ArduIMU_event (void) |
Variables | |
| struct FloatEulers | arduimu_eulers |
| ArduIMU simulation. More... | |
| struct FloatRates | arduimu_rates |
| struct FloatVect3 | arduimu_accel |
| float | ins_roll_neutral |
| float | ins_pitch_neutral |
| bool | arduimu_calibrate_neutrals |
| void ArduIMU_event | ( | void | ) |
Definition at line 41 of file ins_arduimu_basic.c.
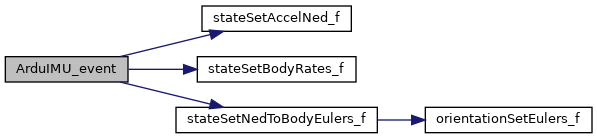
References ACCEL_FLOAT_OF_BFP, ANGLE_FLOAT_OF_BFP, ardu_gps_trans, ardu_ins_trans, arduimu_accel, arduimu_eulers, arduimu_rates, i2c_transaction::buf, DefaultChannel, DefaultDevice, I2CTransDone, I2CTransFailed, I2CTransSuccess, ins_pitch_neutral, ins_roll_neutral, FloatRates::p, FloatEulers::phi, FloatEulers::psi, FloatRates::q, FloatRates::r, RATE_FLOAT_OF_BFP, recievedData, stateSetAccelNed_f(), stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), i2c_transaction::status, FloatEulers::theta, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Here is the call graph for this function:| void ArduIMU_init | ( | void | ) |
Definition at line 25 of file ins_arduimu.c.
References ardu_gps_trans, ardu_ins_trans, arduimu_accel, arduimu_calibrate_neutrals, arduimu_eulers, arduimu_rates, i2c_transaction::buf, FLOAT_EULERS_ZERO, FLOAT_RATES_ZERO, FLOAT_VECT3_ZERO, gps_daten_abgespeichert, gps_daten_versendet_msg1, gps_daten_versendet_msg2, high_accel_done, high_accel_flag, I2CTransDone, imu_daten_angefordert, ins_pitch_neutral, INS_PITCH_NEUTRAL_DEFAULT, ins_roll_neutral, INS_ROLL_NEUTRAL_DEFAULT, messageNr, i2c_transaction::status, throttle_slew, and V_CTL_THROTTLE_SLEW.
| void ArduIMU_periodic | ( | void | ) |
Definition at line 26 of file ins_arduimu.c.
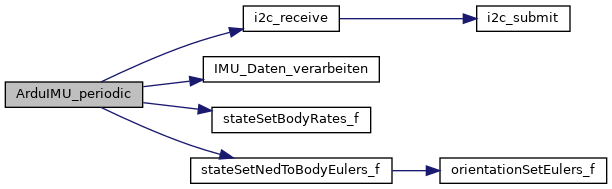
References ardu_ins_trans, ARDUIMU_I2C_DEV, ArduIMU_SLAVE_ADDR, i2c_receive(), I2CTransDone, imu_daten_angefordert, IMU_Daten_verarbeiten(), ins_pitch_neutral, ins_roll_neutral, NB_DATA, sim_p, sim_phi, sim_q, sim_r, sim_theta, stateSetBodyRates_f(), stateSetNedToBodyEulers_f(), i2c_transaction::status, and TRUE.
Here is the call graph for this function:| void ArduIMU_periodicGPS | ( | void | ) |
Definition at line 36 of file ins_arduimu.c.
References LlaCoor_i::alt, ardu_gps_trans, arduimu_calibrate_neutrals, ARDUIMU_I2C_DEV, ArduIMU_SLAVE_ADDR, i2c_transaction::buf, GpsState::course, FALSE, FillBufWith32bit, GpsState::fix, gps, GPS_Data, gps_daten_abgespeichert, gps_daten_versendet_msg1, gps_daten_versendet_msg2, gps_ubx, GpsState::gspeed, high_accel_done, high_accel_flag, HIGH_ACCEL_HIGH_THRUST, HIGH_ACCEL_HIGH_THRUST_RESUME, HIGH_ACCEL_LOW_SPEED, GpsState::hmsl, i2c_transmit(), I2CTransDone, imu_daten_angefordert, IMU_Daten_verarbeiten(), LlaCoor_i::lat, GpsState::lla_pos, LlaCoor_i::lon, messageNr, GpsState::ned_vel, GpsState::num_sv, GpsState::speed_3d, stateGetHorizontalSpeedNorm_f(), i2c_transaction::status, GpsUbx::status_flags, GpsState::tow, TRUE, and NedCoor_i::z.
Here is the call graph for this function:| struct FloatVect3 arduimu_accel |
Definition at line 14 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), and ArduIMU_init().
| bool arduimu_calibrate_neutrals |
Definition at line 18 of file ins_arduimu_basic.c.
Referenced by ArduIMU_init(), and ArduIMU_periodicGPS().
| struct FloatEulers arduimu_eulers |
ArduIMU simulation.
Sim provides attitude and rates.
Definition at line 12 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), and ArduIMU_init().
| struct FloatRates arduimu_rates |
Definition at line 13 of file ins_arduimu_basic.c.
Referenced by ArduIMU_event(), and ArduIMU_init().
| float ins_pitch_neutral |
Definition at line 15 of file ins_arduimu.c.
| float ins_roll_neutral |
Definition at line 14 of file ins_arduimu.c.
 1.8.17
1.8.17