|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
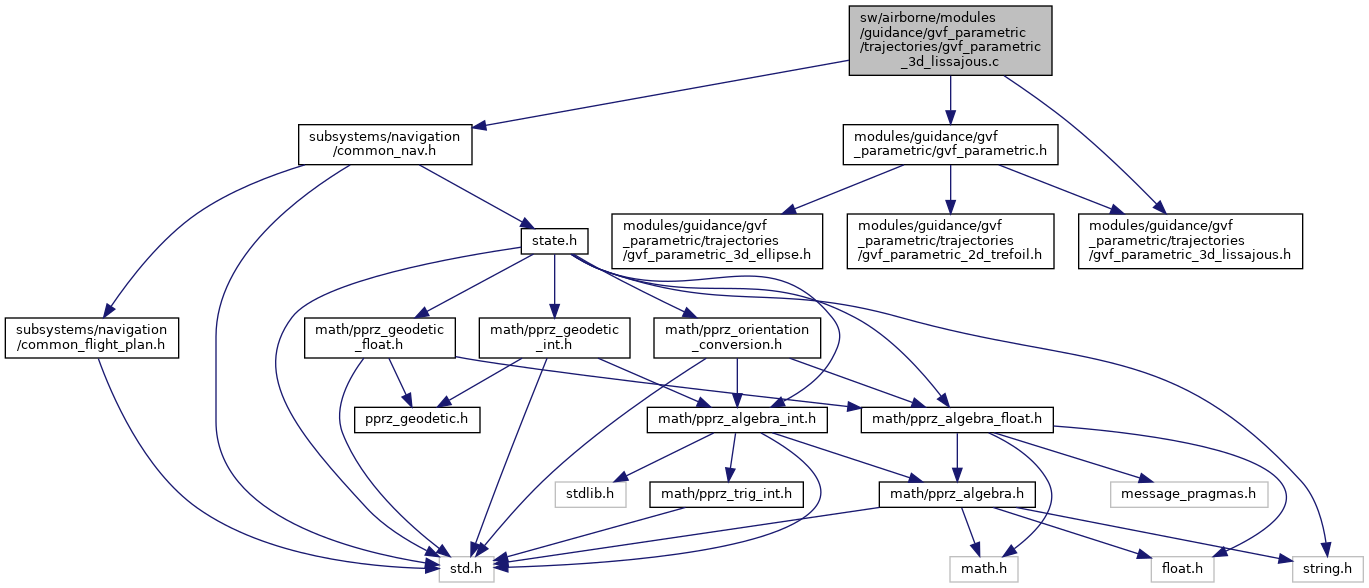
#include "subsystems/navigation/common_nav.h"#include "modules/guidance/gvf_parametric/gvf_parametric.h"#include "gvf_parametric_3d_lissajous.h" Include dependency graph for gvf_parametric_3d_lissajous.c:
Include dependency graph for gvf_parametric_3d_lissajous.c:Go to the source code of this file.
Macros | |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_KX 0.001 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_KY 0.001 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_KZ 0.001 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_CX 80 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_CY 80 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_CZ 10 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_WX 1 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_WY 1 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_WZ 1 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_DX 0 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_DY 0 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_DZ 0 |
| #define | GVF_PARAMETRIC_3D_LISSAJOUS_ALPHA 0 |
Functions | |
| void | gvf_parametric_3d_lissajous_info (float *f1, float *f2, float *f3, float *f1d, float *f2d, float *f3d, float *f1dd, float *f2dd, float *f3dd) |
Guiding vector field algorithm for 2D and 3D complex trajectories.
3D lissajous
Definition in file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_ALPHA 0 |
Default orientation in degrees for the trajectory in the XY plane
Definition at line 95 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_CX 80 |
Default amplitude of the trajectory in the X plane
Definition at line 50 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_CY 80 |
Default amplitude of the trajectory in the Y plane
Definition at line 55 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_CZ 10 |
Default amplitude of the trajectory in the Z plane
Definition at line 60 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_DX 0 |
Default offphase of the trajectory in the X plane
Definition at line 80 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_DY 0 |
Default offphase of the trajectory in the Y plane
Definition at line 85 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_DZ 0 |
Default offphase of the trajectory in the Z plane
Definition at line 90 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_KX 0.001 |
Default gain kx for the 3d lissajous trajectory
Definition at line 35 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_KY 0.001 |
Default gain ky for the 3d lissajous trajectory
Definition at line 40 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_KZ 0.001 |
Default gain kz for the 3d lissajous trajectory
Definition at line 45 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_WX 1 |
Default frequency of the trajectory in the X plane
Definition at line 65 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_WY 1 |
Default frequency of the trajectory in the Y plane
Definition at line 70 of file gvf_parametric_3d_lissajous.c.
| #define GVF_PARAMETRIC_3D_LISSAJOUS_WZ 1 |
Default frequency of the trajectory in the Z plane
Definition at line 75 of file gvf_parametric_3d_lissajous.c.
| void gvf_parametric_3d_lissajous_info | ( | float * | f1, |
| float * | f2, | ||
| float * | f3, | ||
| float * | f1d, | ||
| float * | f2d, | ||
| float * | f3d, | ||
| float * | f1dd, | ||
| float * | f2dd, | ||
| float * | f3dd | ||
| ) |
Definition at line 100 of file gvf_parametric_3d_lissajous.c.
References gvf_parametric_con::beta, gvf_parametric_control, gvf_parametric_trajectory, gvf_parametric_tra::p_parametric, gvf_parametric_con::s, and gvf_parametric_con::w.
Referenced by gvf_parametric_3D_lissajous_XYZ().
Here is the caller graph for this function:Definition at line 98 of file gvf_parametric_3d_lissajous.c.
Referenced by gvf_parametric_3D_lissajous_XYZ().
 1.8.17
1.8.17