|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
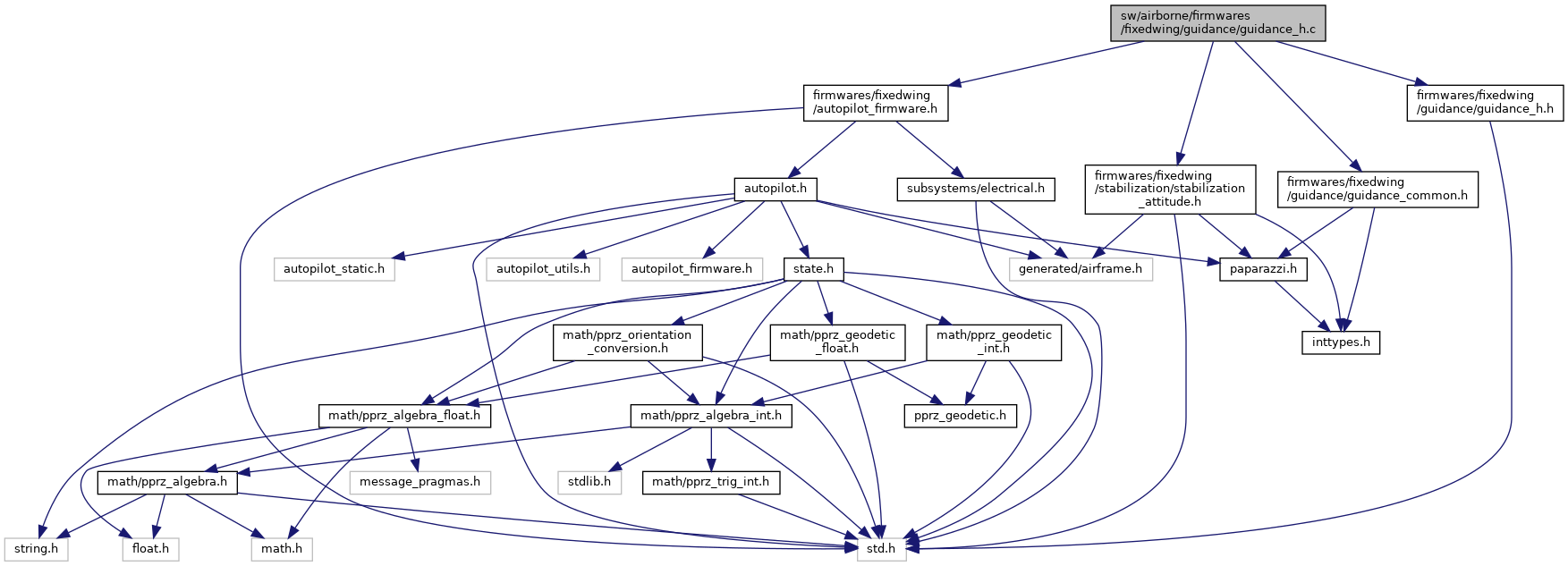
#include "firmwares/fixedwing/guidance/guidance_h.h"#include "firmwares/fixedwing/autopilot_firmware.h"#include "firmwares/fixedwing/guidance/guidance_common.h"#include "firmwares/fixedwing/stabilization/stabilization_attitude.h" Include dependency graph for guidance_h.c:
Include dependency graph for guidance_h.c:Go to the source code of this file.
Functions | |
| void | h_ctl_guidance_loop (void) |
| General guidance logic This will call the proper control loops according to the sub-modes. More... | |
Horizontal guidance logic for fixed wing vehicles.
This is a hack for generated autopilot
Definition in file guidance_h.c.
| void h_ctl_guidance_loop | ( | void | ) |
General guidance logic This will call the proper control loops according to the sub-modes.
Definition at line 33 of file guidance_h.c.
References h_ctl_course_loop(), h_ctl_pitch_setpoint, lateral_mode, LATERAL_MODE_COURSE, and v_ctl_pitch_setpoint.
Here is the call graph for this function: 1.8.17
1.8.17