|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "inttypes.h" Include dependency graph for detect_window.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for detect_window.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | MODE_DARK 0 |
| #define | MODE_BRIGHT 1 |
Functions | |
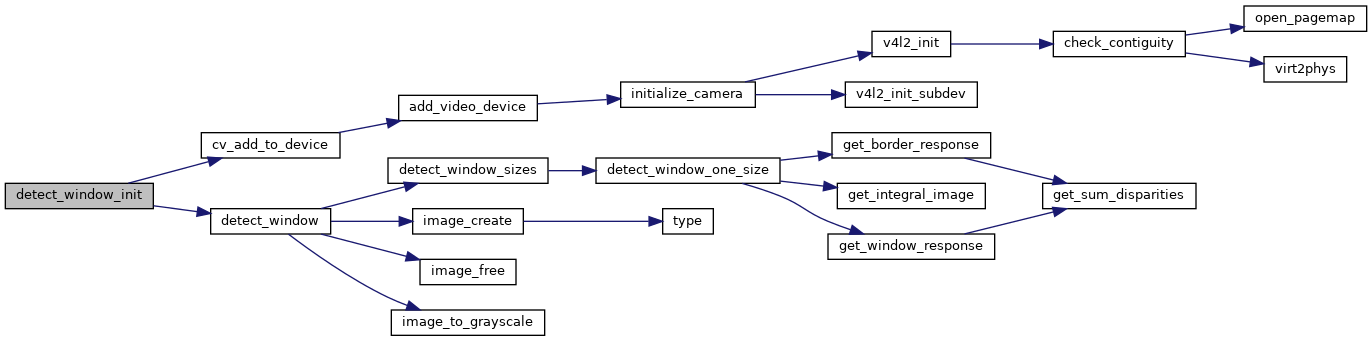
| void | detect_window_init (void) |
| struct image_t * | detect_window (struct image_t *img, uint8_t camera_id) |
| uint16_t | detect_window_sizes (uint8_t *in, uint32_t image_width, uint32_t image_height, uint16_t *coordinate, uint32_t *integral_image, uint8_t MODE) |
| uint16_t | detect_window_one_size (uint8_t *in, uint32_t image_width, uint32_t image_height, uint16_t *coordinate, uint16_t *size, uint8_t calculate_integral_image, uint32_t *integral_image, uint8_t MODE) |
| uint16_t | detect_escape (uint8_t *in, uint32_t image_width, uint32_t image_height, uint16_t *escape_coordinate, uint32_t *integral_image, uint8_t n_cells) |
| void | get_integral_image (uint8_t *in, uint32_t image_width, uint32_t image_height, uint32_t *integral_image) |
| uint32_t | get_sum_disparities (uint16_t min_x, uint16_t min_y, uint16_t max_x, uint16_t max_y, uint32_t *integral_image, uint32_t image_width, uint32_t image_height) |
| uint32_t | get_avg_disparity (uint16_t min_x, uint16_t min_y, uint16_t max_x, uint16_t max_y, uint32_t *integral_image, uint32_t image_width, uint32_t image_height) |
| uint16_t | get_window_response (uint16_t x, uint16_t y, uint16_t feature_size, uint16_t border, uint32_t *integral_image, uint16_t image_width, uint16_t image_height, uint16_t px_inner, uint16_t px_border, uint8_t MODE) |
| uint16_t | get_border_response (uint16_t x, uint16_t y, uint16_t feature_size, uint16_t window_size, uint16_t border_size, uint32_t *integral_image, uint16_t image_width, uint16_t image_height, uint16_t px_inner, uint16_t px_outer) |
| void | filter_bad_pixels (uint8_t *in, uint32_t image_width, uint32_t image_height) |
| void | transform_illuminance_image (uint8_t *in, uint8_t *out, uint32_t image_width, uint32_t image_height, uint8_t n_bits, uint8_t bright_win) |
Detect a bright region surrounded by dark or viceversa - sometimes this corresponds to a window.
Definition in file detect_window.h.
| #define MODE_BRIGHT 1 |
Definition at line 33 of file detect_window.h.
| #define MODE_DARK 0 |
Definition at line 32 of file detect_window.h.
| uint16_t detect_escape | ( | uint8_t * | in, |
| uint32_t | image_width, | ||
| uint32_t | image_height, | ||
| uint16_t * | escape_coordinate, | ||
| uint32_t * | integral_image, | ||
| uint8_t | n_cells | ||
| ) |
Definition at line 172 of file detect_window.c.
References c(), and get_avg_disparity().
Here is the call graph for this function:Definition at line 48 of file detect_window.c.
References image_t::buf, detect_window_sizes(), image_t::h, image_create(), image_free(), IMAGE_GRAYSCALE, image_to_grayscale(), MODE_BRIGHT, and image_t::w.
Referenced by detect_window_init().
Here is the call graph for this function: Here is the caller graph for this function:| void detect_window_init | ( | void | ) |
Definition at line 39 of file detect_window.c.
References cv_add_to_device(), detect_window(), and DETECT_WINDOW_FPS.
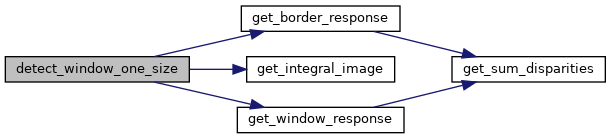
Here is the call graph for this function:| uint16_t detect_window_one_size | ( | uint8_t * | in, |
| uint32_t | image_width, | ||
| uint32_t | image_height, | ||
| uint16_t * | coordinate, | ||
| uint16_t * | size, | ||
| uint8_t | calculate_integral_image, | ||
| uint32_t * | integral_image, | ||
| uint8_t | MODE | ||
| ) |
Definition at line 100 of file detect_window.c.
References get_border_response(), get_integral_image(), get_window_response(), MODE_DARK, and RES.
Referenced by detect_window_sizes().
Here is the call graph for this function: Here is the caller graph for this function:| uint16_t detect_window_sizes | ( | uint8_t * | in, |
| uint32_t | image_width, | ||
| uint32_t | image_height, | ||
| uint16_t * | coordinate, | ||
| uint32_t * | integral_image, | ||
| uint8_t | MODE | ||
| ) |
Definition at line 69 of file detect_window.c.
References detect_window_one_size(), N_WINDOW_SIZES, and s.
Referenced by cv_window_func(), and detect_window().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 320 of file detect_window.c.
| uint32_t get_avg_disparity | ( | uint16_t | min_x, |
| uint16_t | min_y, | ||
| uint16_t | max_x, | ||
| uint16_t | max_y, | ||
| uint32_t * | integral_image, | ||
| uint32_t | image_width, | ||
| uint32_t | image_height | ||
| ) |
Definition at line 237 of file detect_window.c.
References h(), RES, and image_t::w.
Referenced by detect_escape().
Here is the call graph for this function: Here is the caller graph for this function:| uint16_t get_border_response | ( | uint16_t | x, |
| uint16_t | y, | ||
| uint16_t | feature_size, | ||
| uint16_t | window_size, | ||
| uint16_t | border_size, | ||
| uint32_t * | integral_image, | ||
| uint16_t | image_width, | ||
| uint16_t | image_height, | ||
| uint16_t | px_inner, | ||
| uint16_t | px_outer | ||
| ) |
Definition at line 285 of file detect_window.c.
References get_sum_disparities(), and RES.
Referenced by detect_window_one_size().
Here is the call graph for this function: Here is the caller graph for this function:| void get_integral_image | ( | uint8_t * | in, |
| uint32_t | image_width, | ||
| uint32_t | image_height, | ||
| uint32_t * | integral_image | ||
| ) |
Definition at line 206 of file detect_window.c.
Referenced by detect_window_one_size().
Here is the caller graph for this function:| uint32_t get_sum_disparities | ( | uint16_t | min_x, |
| uint16_t | min_y, | ||
| uint16_t | max_x, | ||
| uint16_t | max_y, | ||
| uint32_t * | integral_image, | ||
| uint32_t | image_width, | ||
| uint32_t | image_height | ||
| ) |
Definition at line 225 of file detect_window.c.
Referenced by get_border_response(), and get_window_response().
Here is the caller graph for this function:| uint16_t get_window_response | ( | uint16_t | x, |
| uint16_t | y, | ||
| uint16_t | feature_size, | ||
| uint16_t | border, | ||
| uint32_t * | integral_image, | ||
| uint16_t | image_width, | ||
| uint16_t | image_height, | ||
| uint16_t | px_inner, | ||
| uint16_t | px_border, | ||
| uint8_t | MODE | ||
| ) |
Definition at line 256 of file detect_window.c.
References get_sum_disparities(), MODE_DARK, and RES.
Referenced by detect_window_one_size().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17