|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
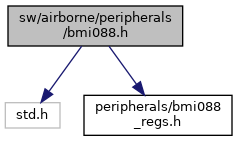
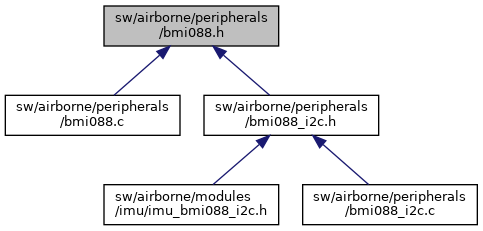
 Include dependency graph for bmi088.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for bmi088.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | Bmi088Config |
Macros | |
| #define | BMI088_DEFAULT_GYRO_RANGE BMI088_GYRO_RANGE_1000 |
| Default gyro full scale range +- 1000°/s. More... | |
| #define | BMI088_DEFAULT_GYRO_ODR BMI088_GYRO_ODR_1000_BW_116 |
| Default gyro output rate. More... | |
| #define | BMI088_DEFAULT_ACCEL_RANGE BMI088_ACCEL_RANGE_12G |
| Default accel full scale range +- 6g. More... | |
| #define | BMI088_DEFAULT_ACCEL_ODR BMI088_ACCEL_ODR_1600 |
| Default accel output rate. More... | |
| #define | BMI088_DEFAULT_ACCEL_BW BMI088_ACCEL_BW_OSR4 |
| Default accel bandwidth. More... | |
| #define | BMI088_GYRO_SENS_125 0.272442 |
| default gyro sensitivy from the datasheet sens = 1/ [LSB/(deg/s)] * pi/180 * 2^INT32_RATE_FRAC ex: BMI with 1000 deg/s has 32.8 LSB/(deg/s) sens = 1/32.8 * pi/180 * 4096 = 2.17953 More... | |
| #define | BMI088_GYRO_SENS_125_NUM 19327 |
| #define | BMI088_GYRO_SENS_125_DEN 17735 |
| #define | BMI088_GYRO_SENS_250 0.544883 |
| #define | BMI088_GYRO_SENS_250_NUM 19327 |
| #define | BMI088_GYRO_SENS_250_DEN 35470 |
| #define | BMI088_GYRO_SENS_500 1.08977 |
| #define | BMI088_GYRO_SENS_500_NUM 57663 |
| #define | BMI088_GYRO_SENS_500_DEN 52913 |
| #define | BMI088_GYRO_SENS_1000 2.17953 |
| #define | BMI088_GYRO_SENS_1000_NUM 18271 |
| #define | BMI088_GYRO_SENS_1000_DEN 8383 |
| #define | BMI088_GYRO_SENS_2000 4.35906 |
| #define | BMI088_GYRO_SENS_2000_NUM 36542 |
| #define | BMI088_GYRO_SENS_2000_DEN 8383 |
| #define | BMI088_ACCEL_SENS_3G 0.919912 |
| default accel sensitivy from the datasheet sens = 9.81 [m/s^2] / [LSB/g] * 2^INT32_ACCEL_FRAC ex: BMI with 6g has 5460 LSB/g sens = 9.81 [m/s^2] / 5460 [LSB/g] * 2^INT32_ACCEL_FRAC = 1.83982 More... | |
| #define | BMI088_ACCEL_SENS_3G_NUM 9199 |
| #define | BMI088_ACCEL_SENS_3G_DEN 10000 |
| #define | BMI088_ACCEL_SENS_6G 1.83982 |
| #define | BMI088_ACCEL_SENS_6G_NUM 18398 |
| #define | BMI088_ACCEL_SENS_6G_DEN 10000 |
| #define | BMI088_ACCEL_SENS_12G 3.67965 |
| #define | BMI088_ACCEL_SENS_12G_NUM 36797 |
| #define | BMI088_ACCEL_SENS_12G_DEN 10000 |
| #define | BMI088_ACCEL_SENS_24G 7.3593 |
| #define | BMI088_ACCEL_SENS_24G_NUM 7359 |
| #define | BMI088_ACCEL_SENS_24G_DEN 1000 |
| #define | BMI088_CONFIG_ACCEL 0 |
| #define | BMI088_CONFIG_GYRO 1 |
Typedefs | |
| typedef void(* | Bmi088ConfigSet) (void *bmi, uint8_t _reg, uint8_t _val, uint8_t _type) |
| Configuration function prototype. More... | |
Functions | |
| void | bmi088_set_default_config (struct Bmi088Config *c) |
| void | bmi088_send_config (Bmi088ConfigSet bmi_set, void *bmi, struct Bmi088Config *config) |
| Configuration sequence called once before normal use. More... | |
Variables | |
| const float | BMI088_GYRO_SENS [5] |
| const int32_t | BMI088_GYRO_SENS_FRAC [5][2] |
| const float | BMI088_ACCEL_SENS [4] |
| const int32_t | BMI088_ACCEL_SENS_FRAC [4][2] |
BMI088 driver common interface (I2C and SPI).
Definition in file bmi088.h.
| struct Bmi088Config |
| Data Fields | ||
|---|---|---|
| enum Bmi088AccelBW | accel_bw | bandwidth |
| enum Bmi088AccelODR | accel_odr | output data rate |
| enum Bmi088AccelRanges | accel_range | g Range |
| enum Bmi088GyroODR | gyro_odr | output data rate |
| enum Bmi088GyroRanges | gyro_range | deg/s Range |
| enum Bmi088ConfStatus | init_status | init status |
| bool | initialized | config done flag |
| #define BMI088_ACCEL_SENS_3G 0.919912 |
| #define BMI088_DEFAULT_ACCEL_BW BMI088_ACCEL_BW_OSR4 |
| #define BMI088_DEFAULT_ACCEL_ODR BMI088_ACCEL_ODR_1600 |
| #define BMI088_DEFAULT_ACCEL_RANGE BMI088_ACCEL_RANGE_12G |
| #define BMI088_DEFAULT_GYRO_ODR BMI088_GYRO_ODR_1000_BW_116 |
| #define BMI088_DEFAULT_GYRO_RANGE BMI088_GYRO_RANGE_1000 |
| #define BMI088_GYRO_SENS_125 0.272442 |
| enum Bmi088ConfStatus |
| void bmi088_send_config | ( | Bmi088ConfigSet | bmi_set, |
| void * | bmi, | ||
| struct Bmi088Config * | config | ||
| ) |
Configuration sequence called once before normal use.
Definition at line 70 of file bmi088.c.
References BMI088_ACCEL_ACTIVE, BMI088_ACCEL_CONF, BMI088_ACCEL_POWER_ON, BMI088_ACCEL_PWR_CONF, BMI088_ACCEL_PWR_CTRl, BMI088_ACCEL_RANGE, BMI088_CONF_ACCEL_ODR, BMI088_CONF_ACCEL_PWR_CONF, BMI088_CONF_ACCEL_PWR_CTRL, BMI088_CONF_ACCEL_RANGE, BMI088_CONF_DONE, BMI088_CONF_GYRO_ODR, BMI088_CONF_GYRO_PWR, BMI088_CONF_GYRO_RANGE, BMI088_CONFIG_ACCEL, BMI088_CONFIG_GYRO, BMI088_GYRO_BAND_WIDTH, BMI088_GYRO_LPM_1, BMI088_GYRO_NORMAL, BMI088_GYRO_RANGE, and config.
Referenced by bmi088_i2c_event(), and bmi088_i2c_start_configure().
Here is the caller graph for this function:| void bmi088_set_default_config | ( | struct Bmi088Config * | c | ) |
Definition at line 61 of file bmi088.c.
References BMI088_DEFAULT_ACCEL_BW, BMI088_DEFAULT_ACCEL_ODR, BMI088_DEFAULT_ACCEL_RANGE, BMI088_DEFAULT_GYRO_ODR, BMI088_DEFAULT_GYRO_RANGE, and c().
Referenced by bmi088_i2c_init().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17