|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
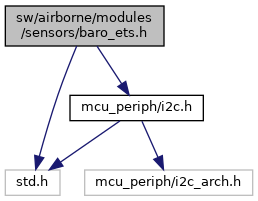
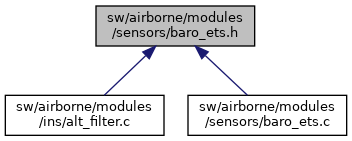
 Include dependency graph for baro_ets.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for baro_ets.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | BARO_ETS_DT BARO_ETS_READ_PERIODIC_PERIOD |
| new measurement every baro_ets_read_periodic More... | |
| #define | BaroEtsEvent() { if (baro_ets_i2c_trans.status == I2CTransSuccess) baro_ets_read_event(); } |
Functions | |
| void | baro_ets_init (void) |
| void | baro_ets_read_periodic (void) |
| void | baro_ets_read_event (void) |
Variables | |
| uint16_t | baro_ets_adc |
| uint16_t | baro_ets_offset |
| bool | baro_ets_valid |
| bool | baro_ets_enabled |
| float | baro_ets_altitude |
| float | baro_ets_r |
| float | baro_ets_sigma2 |
| struct i2c_transaction | baro_ets_i2c_trans |
Driver for the EagleTree Systems Altitude Sensor. Has only been tested with V3 of the sensor hardware.
Notes: Connect directly to TWOG/Tiny I2C port. Multiple sensors can be chained together. Sensor should be in the proprietary mode (default) and not in 3rd party mode. Pitch gains may need to be updated.
Sensor module wire assignments: Red wire: 5V White wire: Ground Yellow wire: SDA Brown wire: SCL
Definition in file baro_ets.h.
| #define BARO_ETS_DT BARO_ETS_READ_PERIODIC_PERIOD |
new measurement every baro_ets_read_periodic
Definition at line 49 of file baro_ets.h.
| #define BaroEtsEvent | ( | ) | { if (baro_ets_i2c_trans.status == I2CTransSuccess) baro_ets_read_event(); } |
Definition at line 65 of file baro_ets.h.
| void baro_ets_init | ( | void | ) |
Definition at line 120 of file baro_ets.c.
References baro_ets_adc, baro_ets_altitude, baro_ets_cnt, baro_ets_delay_done, baro_ets_delay_time, baro_ets_enabled, baro_ets_i2c_trans, baro_ets_offset, baro_ets_offset_init, BARO_ETS_OFFSET_NBSAMPLES_AVRG, BARO_ETS_OFFSET_NBSAMPLES_INIT, baro_ets_offset_tmp, BARO_ETS_R, baro_ets_r, BARO_ETS_SIGMA2, baro_ets_sigma2, baro_ets_valid, I2CTransDone, i2c_transaction::status, and SysTimeTimerStart.
| void baro_ets_read_event | ( | void | ) |
Definition at line 151 of file baro_ets.c.
References baro_ets_adc, BARO_ETS_ALT_SCALE, baro_ets_altitude, baro_ets_cnt, baro_ets_i2c_trans, baro_ets_offset, baro_ets_offset_init, BARO_ETS_OFFSET_MAX, BARO_ETS_OFFSET_MIN, BARO_ETS_OFFSET_NBSAMPLES_AVRG, baro_ets_offset_tmp, BARO_ETS_PRESSURE_OFFSET, BARO_ETS_SCALE, BARO_ETS_SENDER_ID, baro_ets_valid, i2c_transaction::buf, DefaultChannel, DefaultDevice, get_sys_time_usec(), ground_alt, I2CTransDone, Bmp3_I2c::pressure, and i2c_transaction::status.
Here is the call graph for this function:| void baro_ets_read_periodic | ( | void | ) |
Definition at line 139 of file baro_ets.c.
References BARO_ETS_ADDR, baro_ets_delay_done, baro_ets_delay_time, BARO_ETS_I2C_DEV, baro_ets_i2c_trans, BARO_ETS_START_DELAY, i2c_receive(), I2CTransDone, i2c_transaction::status, SysTimeTimer, and USEC_OF_SEC.
Here is the call graph for this function:| uint16_t baro_ets_adc |
Definition at line 103 of file baro_ets.c.
Referenced by baro_ets_init(), and baro_ets_read_event().
| float baro_ets_altitude |
Definition at line 106 of file baro_ets.c.
Referenced by alt_filter_periodic(), baro_ets_init(), and baro_ets_read_event().
| bool baro_ets_enabled |
Definition at line 107 of file baro_ets.c.
Referenced by alt_kalman(), and baro_ets_init().
| struct i2c_transaction baro_ets_i2c_trans |
Definition at line 111 of file baro_ets.c.
Referenced by baro_ets_init(), baro_ets_read_event(), and baro_ets_read_periodic().
| uint16_t baro_ets_offset |
Definition at line 104 of file baro_ets.c.
Referenced by baro_ets_init(), and baro_ets_read_event().
| float baro_ets_r |
Definition at line 108 of file baro_ets.c.
Referenced by alt_kalman(), and baro_ets_init().
| float baro_ets_sigma2 |
Definition at line 109 of file baro_ets.c.
Referenced by alt_kalman(), and baro_ets_init().
| bool baro_ets_valid |
Definition at line 105 of file baro_ets.c.
Referenced by baro_ets_init(), and baro_ets_read_event().
 1.8.17
1.8.17